 電子發燒友App
電子發燒友App


1、引言
在對機動車輛進行噪聲、加速性能、最高車速、油耗等環保、安全、經濟指標進行測試時,都需要對車速進行測量和控制,現有國家標準中所規定的車速測量方法大都采用電子計時裝置或秒表,測量車輛行駛過一段固定距離所用的時間,然后求出平均車速。一般電子計時裝置的處理器和顯示器部分基本相同,只是測速傳感器部分有所不同,而傳感器的特性又直接影響到測量結果的準確性。目前常用的測速傳感器有壓敏傳感器、COMS攝像頭配合平行光源等,前者結構簡單,但鋪設比較麻煩,傳感器易受損,長期使用后靈敏度降低,從而影響測量結果;后者靈敏度高,測量精確,但成本過高,涉及較多設備,對光源的擺放也有較高要求。
考慮到以上問題,筆者利用LM567設計出一種新的紅外線測速傳感器。這種傳感器體積小、成本低,操作簡單,使用方便,具有較高的靈敏度、準確性、穩定性和抗干擾能力,適用于測量車輛在一段固定行駛距離內的平均速度。
2、傳統測速裝置的工作原理
下面以測量摩托車加速噪聲為例,介紹目前通常采用的傳統測速裝置的原理及其優缺點。圖1是摩托車加速噪聲試驗的布置簡圖。
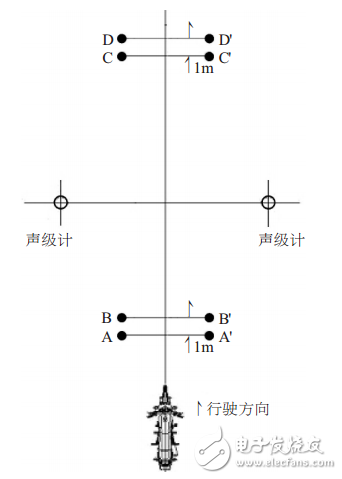
圖1 ?試驗布置簡圖
(1)對于采用壓帶路試儀的測速方法,分別在AA’、BB’、CC’、DD’處擺放壓帶并將壓帶與路面良好粘貼,AA’與BB’、CC’與DD’之間的距離(即測速區)為1米,用線纜將壓帶與路試儀按順序連接,當車輛經過AA’處壓帶時,觸發壓帶中的壓敏傳感器,該觸發信號被送到路試儀中,使其內部計時裝置開始計時,當車輛通過BB’時,再次產生觸發信號使計時裝置停止計時,利用路試儀的內部處理器,將通過AA’與BB’之間這段距離所用的時間轉換為車速,并顯示在液晶屏上。同理在CC’與DD’之間也可測得一個車速值,從而滿足噪聲測量的要求。這種測速方法工作原理簡單,但鋪設比較麻煩,傳感器易受損,長期使用后會造成靈敏度降低,從而影響測量結果。
(2)對于采用激光路試儀的測速方法,分別在A、B、C、D四個位置擺放四個平行激光光源,在A’B’C’D’四個位置擺放四個接收激光信號用的CMOS攝像頭,調整光源使其發出的激光對準攝像頭中心,將攝像頭按順序連接至路試儀,當車輛經過AA’時,光線被阻擋,攝像頭產生一個觸發信號,使路試儀內部計時裝置工作,當車輛通過BB’時,再次產生觸發信號使計時裝置停止計時,利用路試儀的內部處理器,將通過AA’與BB’之間這段距離所用的時間轉換為車速,并顯示在液晶屏上。同理可在CC’與DD’之間測得一個車速值。這種測速方法的靈敏度和測量精確度都很高,但是操作極其不便,每個激光光源都需要獨立的電源供電,而且激光信號必須正對攝像頭的中心接收點,對光源的擺放有很高的要求,否則傳感器難以正常工作。
3、基于LM567的紅外線測速傳感器的工作原理
本文利用鎖相環音頻譯碼芯片LM567,設計出一種新的紅外線測速傳感器,其電路圖及工作原理如下。
3.1、LM567的內部結構及功能
LM567專門用于解調某一單音頻率的調制信號,其工作頻率可高達500kHz。在工業自動控制、遙控遙測、保安報警等領域有廣泛應用。
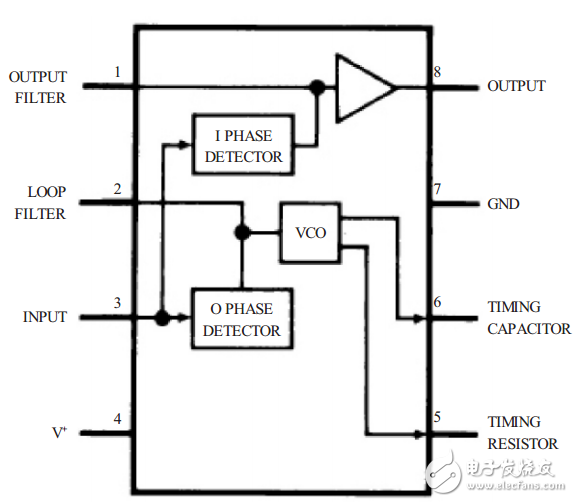
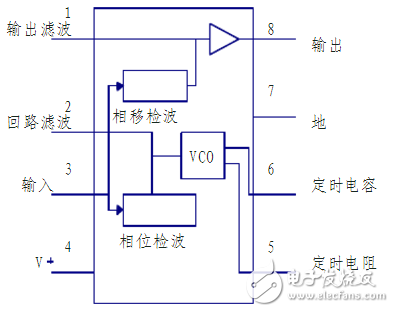
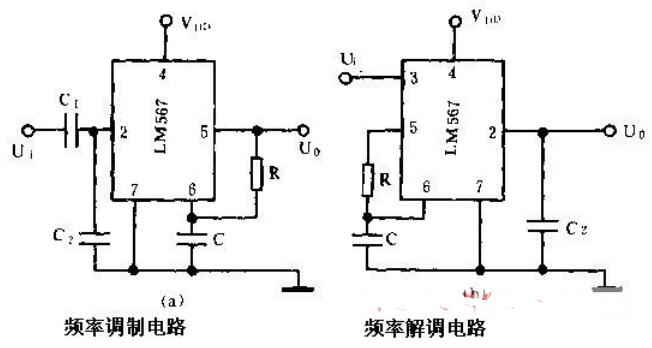
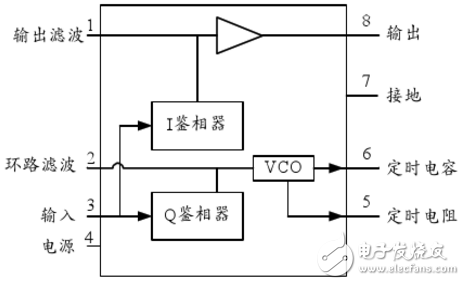
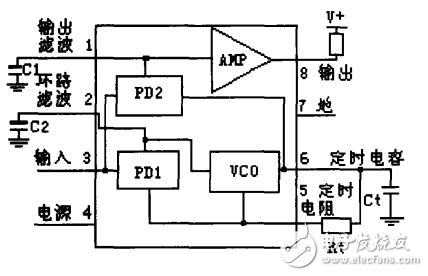
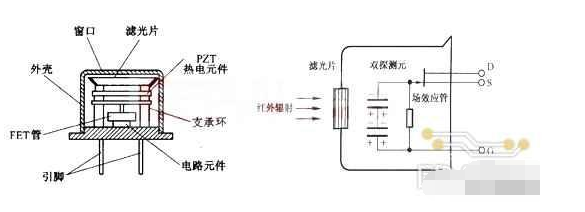
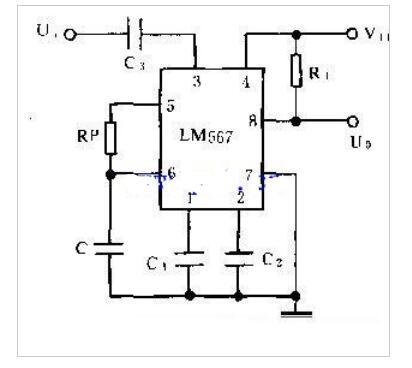
圖2 ?LM567
LM567主要由正交相位檢波器、鎖相環和放大器等組成。其內部結構如圖2所示。LM567的5、6腳分別外接定時用的阻容元件R、C,R、C決定了鎖相環內部壓控振蕩器的中心頻率f0,即f0≈1/1.1RC。電阻R跨接在5、6腳之間,6腳通過電容C接地(Uss)。若R取2~20kΩ,則LM567能解調出0.01~500kHz范圍內的單音信號。LM567的1、2腳分別對地接一電容器,形成輸出濾波網絡和鎖相環低通濾波網絡,2腳上的外接電容器C2的容量決定了鎖相環的捕捉帶寬,其大小為Bw≈1070(Uin/f0C2)^1/2式中,Uin為由3腳輸入的正弦波信號電壓的有效值,要求Uin≥25mV,一般在100~200mV之間。1腳外接電容C1為正交相位檢波器的輸出濾波電容,其容量大小為2腳所接的電容C2容量的二倍以上,即應滿足C1≥2C2。
(1)LM567作頻率調制器
2腳接鎖相環的低通濾波器的輸入端。從2腳加入的調制信號經低通濾波器濾除帶外雜音和噪聲后,加至壓控振蕩器的中心頻率f0進行調頻,然后由5腳輸出調頻信號。調頻信號的中心頻率f0由接在5、6腳的RC阻容網絡的參數來確定。用LM567作頻率調制電路時只使用了它內部鎖相環路的低通濾波器和壓控振蕩器。改變RC網絡落的參數值,可實現對不同頻率的調制。
(2)LM567作頻率解調器
已調制信號從3腳輸入,當輸入信號的中心頻率與LM567內的壓控振蕩器的中心頻率f0相等時,環路的低通濾波器(2腳)輸出已解調信號。
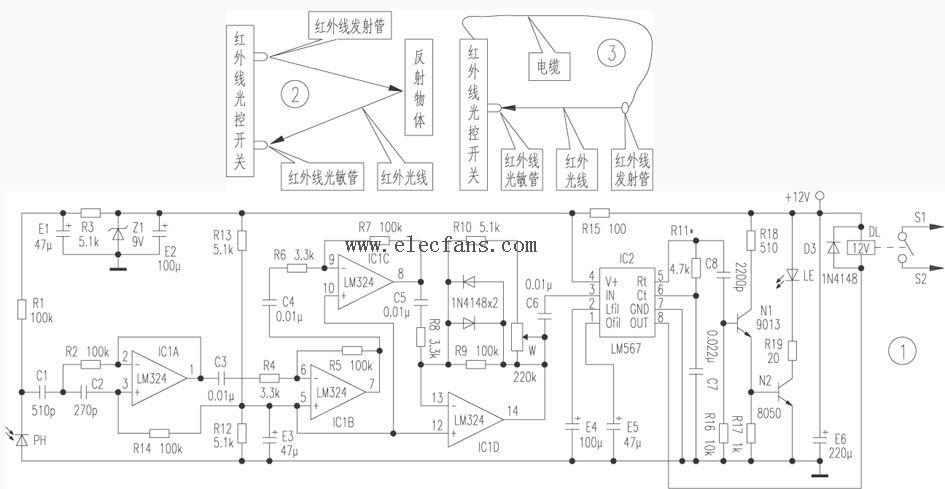
3.2、基于LM567的紅外線測速原理
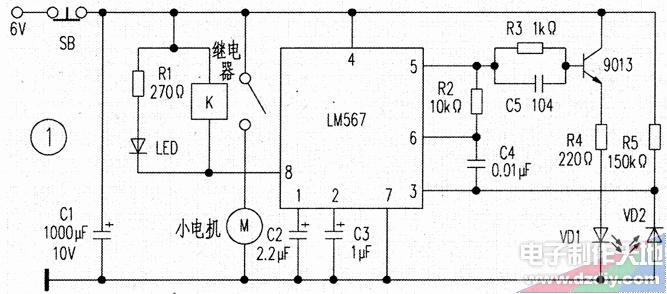
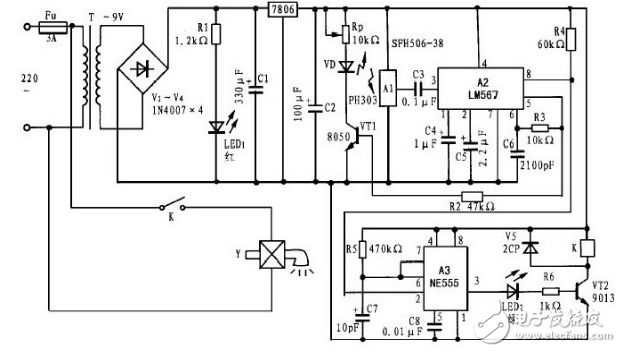
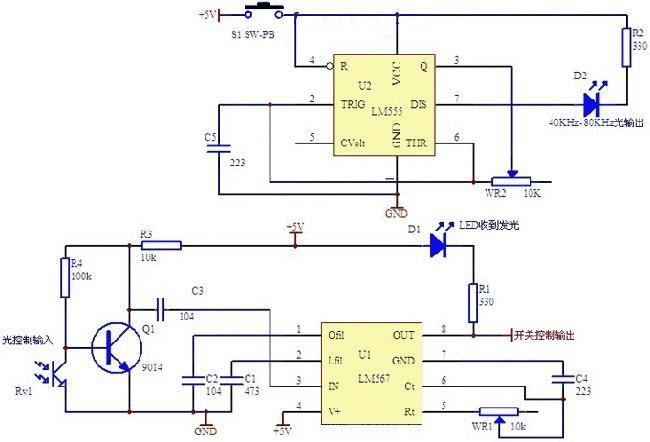
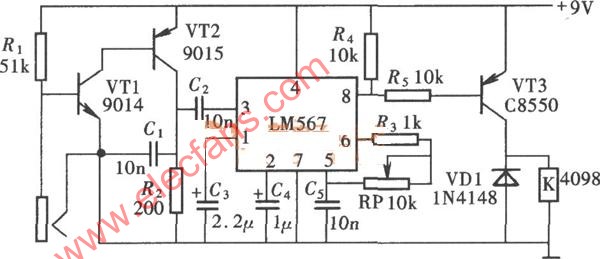
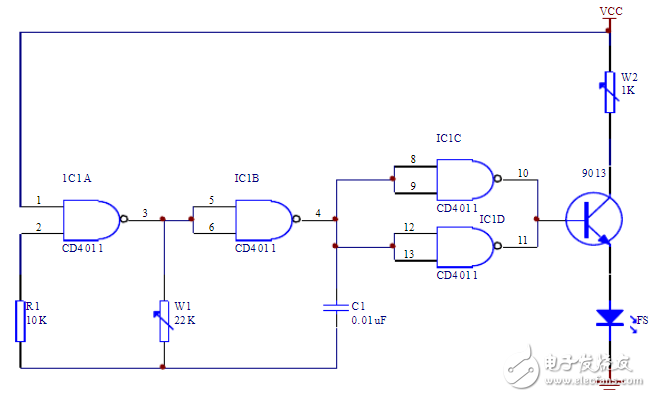
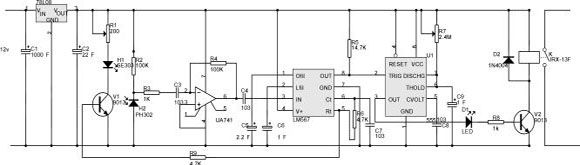
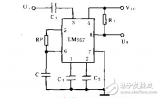
基于LM567的紅外線測速傳感器電路圖如圖3所示,LM567的內部振蕩器提供方波信號,驅動四個LED向外發射紅外線,其頻率由R2和C4來決定。
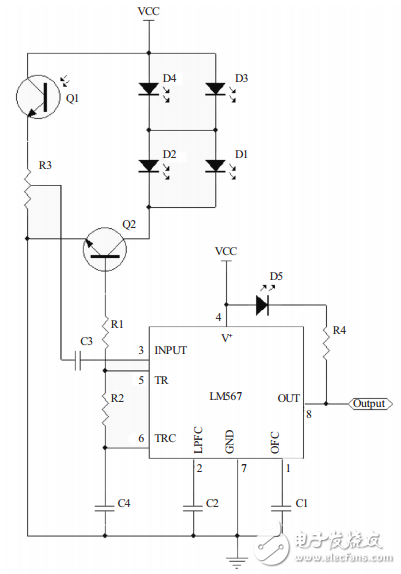
圖3 紅外線測速傳感器電路圖
將四個傳感器分別放置在圖1中A、B、C、D四個位置,當車輛經過傳感器時,LED發出的紅外線被車體反射,光敏管Q1接收到反射光,經三極管放大,轉換成電壓信號后送到LM567的內部鑒相器同步解調,然后由LM567內部的比較器轉換為數字信號從8腳輸出。該輸出信號被傳送到路試儀中,觸發路試儀中的計時裝置開始計時;同理,當車輛經過B點的傳感器時,又會產生一個觸發信號使計時裝置停止計時,經過路試儀內部處理器運算從而得到車輛經過AA’和BB’時的車速。
LM567為鎖相環音頻譯碼電路,在電路中它是用來選頻的,即只有當3腳輸入信號的頻率和LM567的內部振蕩器頻率相一致時,電路輸出低電平,否則輸出高電平。也就是說,只有當Q1接收到的反射紅外線來自于其自身電路里的LED時,LM567才會輸出一個從高變低的觸發信號給路試儀。
該電路的最大特點是實現了紅外線發射頻率與接收電路工作頻率的自動同步;即紅外發射部分不設專門的脈沖發生電路,而直接從接收部分的檢測電路引入脈沖(LM567的鎖相中心頻率信號),簡化了線路和調試工作,避免了周圍環境變化和元件參數改變造成的收、發頻率不一致,排除了相鄰傳感器之間的互相干擾,使電路穩定性和抗干擾能力大大增強。
4、結語
基于LM567調制和解調功能所設計出來的紅外線測速傳感器,實現了紅外線發射頻率與接收電路工作頻率的自動同步,有較強的抗干擾能力和穩定性,成本低,結構簡單,可廣泛用于汽車、摩托車等車輛平均車速的測量。











 工商網監
工商網監
評論