 電子發燒友App
電子發燒友App


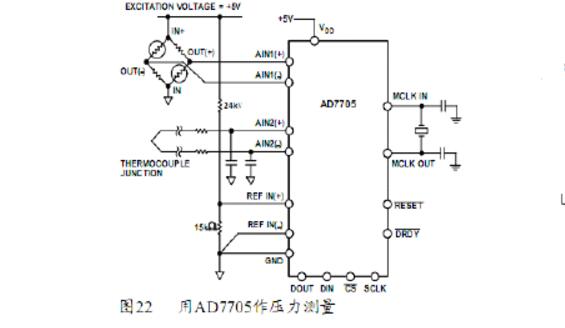
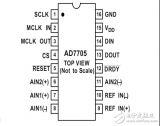
AD7705應用注意要點和程序
(1) DRDY邏輯不要搞反,高電平時等待轉換狀態,低電平為可以讀取轉換數據
(2) 系統校準時輸入信號要大于所選量程的4/5,否則校準不到32767。
(3)校準時要等待一定的時間,讀取數據也一樣,不能超過轉換速率。
(4) 一般的應用只要內部校準,這個很簡單,只要初始化就可以。如果測量范圍不是芯片的范圍,可以通過系統校準來實現,滿量程校準電壓要大于量程的4/5
#include 《util/delay.h》
#include 《avr/eeprom.h》
#include “ad7705.h”
#include “main.h”
#include “crc16.h”
#include “Usart.h”
/針對四個量程的設置寄存器的設置內容
//(1)對于單極性V級別輸入0-5V、0-20mA、0-10V這三個量程,輸入范圍為0-2V,無極性,增益為1,緩沖模式--0-2V
//(2)對于雙極性V級別輸入+-2.5V、+-5V這兩個量程,輸入范圍為+-1V,雙極性,增益為2,緩沖模式--+-2V
//(3)對于雙精度mV級別輸入+-500mV,增益為4,雙極性,緩沖模式--+-2V
//(4)對雙精度mV級別+-50mV,增益為32,雙極性,緩沖模式--+-1.6V
//------MD1(0) MD0(0) G2(0) G1(0) G0(0) B/U(0) BUF(0) FSYNC(0)
--------------------------//
const unsigned char text_of_setup[4]={0X04,0X08,0X10,0X28}; //非緩沖模式,數字濾波同步
//const unsigned char text_of_setup[4]={0X06,0X0A,0X12,0X2A}; //緩沖模式,數字濾波同步
extern volatile unsigned char command[7]; //校準命令全局數組
extern volatile unsigned char scale; //記錄系統量程
extern volatile unsigned char NO_CALI_TYPE; //未校準類型
extern volatile unsigned long int ZS,GS; //當前量程的校準系數
extern volatile unsigned char time_count; //超時標志
//----------------------------------------------------------------------------
//函數:reset_AD7705
//功能:AD7705串行接口失步后將其復位。復位后要延時500us再訪問
//參數:無
//返回:無
//變量:無
//備注:無
//----------------------------------------------------------------------------
void reset_AD7705(void)
{
unsigned char i;
AD_DIN1;
for( i=0; i《36; i++ )
{
AD_CLK0;
asm(“nop”);
asm(“nop”);
asm(“nop”);
AD_CLK1;
asm(“nop”);
asm(“nop”);
asm(“nop”);
}
_delay_ms(1);
}
//------------------------------------------------------------------------------------------
//函數:read_AD7705_byte
//功能:從AD7705讀一個字節的數據
//參數:無
//返回:讀到的一字節數據
//變量:無
//備注:無
//------------------------------------------------------------------------------------------
unsigned char read_AD7705_byte(void)
{
unsigned char data = 0;
unsigned char i = 0;
for( i=0; i《8; i++ )
{
data 《《= 1;
AD_CLK0;
asm(“nop”);
asm(“nop”);
asm(“nop”);
if(AD_DOUT)
{
data++;
}
AD_CLK1;
asm(“nop”);
asm(“nop”);
asm(“nop”);
}
return data;
}
//------------------------------------------------------------------------------------------
//函數:read_AD7705_word
//功能:從AD7705讀一個字的數據,共16bit
//參數:無
//返回:讀到的一字節數據
//變量:無
//備注:無
//------------------------------------------------------------------------------------------
unsigned int read_AD7705_word(void)
{
unsigned int data = 0;
unsigned char i = 0;
for( i=0; i《16; i++ )
{
data 《《= 1;
AD_CLK0;
asm(“nop”);
asm(“nop”);
asm(“nop”);
if(AD_DOUT)
{
data++;
}
AD_CLK1;
asm(“nop”);
asm(“nop”);
asm(“nop”);
}
return data;
}
//------------------------------------------------------------------------------------------
//函數:read_AD7705_dword
//功能:從AD7705讀一個24的數據
//參數:無
//返回:讀到的一字節數據
//變量:無
//備注:AD7705是一個24位AD,選定刷新頻率在16.7HZ下,有效位是19位,暫時讀出全部24位數據
//------------------------------------------------------------------------------------------
unsigned long int read_AD7705_dword(void)
{
unsigned long data = 0;
unsigned char i = 0;
for( i=0; i《24; i++ )
{
data 《《= 1;
AD_CLK0;
asm(“nop”);
asm(“nop”);
asm(“nop”);
if(AD_DOUT)
{
data++;
}
AD_CLK1;
asm(“nop”);
asm(“nop”);
asm(“nop”);
}
return data;
}
//------------------------------------------------------------------------------------------
//函數:write_AD7705_byte
//功能:往AD7705寫8位數據
//參數:IN - uint8_t data,要寫入AD7705的數據
//返回:無
//變量:無
//備注:無
//------------------------------------------------------------------------------------------
void write_AD7705_byte(unsigned char data)
{
for(unsigned char i=0; i《8; i++)
{
AD_CLK0;
if(data&0x80)
AD_DIN1;
else
AD_DIN0;
asm(“nop”);
asm(“nop”);
asm(“nop”);
AD_CLK1;
asm(“nop”);
asm(“nop”);
asm(“nop”);
data 《《= 1;
}
AD_DIN1;
}
//------------------------------------------------------------------------------------------
//函數:write_AD7705_dword
//功能:往AD7705寫24位數據,因為AD7705是24位的器件
//參數:IN - int32_t data,要寫入AD7705的數據
//返回:無
//變量:無
//備注:無
//------------------------------------------------------------------------------------------
void write_AD7705_dword(unsigned long int data)
{
for(unsigned char i = 0; i《24; i++)
{
AD_CLK0;
if(data&0x800000)
AD_DIN1;
else
AD_DIN0;
asm(“nop”);
asm(“nop”);
asm(“nop”);
AD_CLK1;
asm(“nop”);
asm(“nop”);
asm(“nop”);
data 《《= 1;
}
AD_DIN1;
}
//--------------------------------------------------------------------------
//-------------------------讀取AD7705轉換數據函數--------------------------
//入口參數:指向main()主函數定義的ad_data變量的常量指針
//--------------------------------------------------------------------------
void ReadData7705(unsigned int *const pdata)
{
unsigned int data=0, fiter[5]={0};
unsigned long int temp=0;
unsigned char i=0, sort_flag=1;
AD_CS0;
_delay_us(5);
start_AD7705();
for( i=0; i《5; i++ )
{
start_timer0();
_delay_ms(2);
while( AD_DRDY )
{
if( time_count 》= time_read_data )
{
stop_timer0();
AD_CS1;
return;
}
}
stop_timer0();
write_AD7705_byte( RD_DATA_REG );
fiter[i] = read_AD7705_word();
}
AD_CS1;
sort_flag = 1;
while( sort_flag )
{
sort_flag = 0;
for( i=0; i《4; i++ )
{
if( fiter[i] 》 fiter[i+1] )
{
data = fiter[i];
fiter[i] = fiter[i+1];
fiter[i+1] = data;
sort_flag = 1;
}
}
}
temp = ( (unsigned long int)fiter[1] + (unsigned long int)fiter[2]
+ (unsigned long int)fiter[3] )/3;
data = (unsigned int)temp;
if( (data《0xfff0) && (data&0x000f)》0x0008 )
{
data 》》= 4;
data++;
}
else
{
data 》》= 4;
}
if( 1 != scale )
{
data -= 0x0800;
}
*pdata = data & 0x0fff;
}
//---------------------------------------------------------------------------------------
gina 發表于 2008-9-22 10:35
//校準命令格式
//STX Data Long Command Code Parameter CheckSum ETX
//0x55 數據長度(2) 量程指示 00H/01H CRC16(2) 0x0D
void AD7705_calibration(void)
{
unsigned char readtimes =0;
unsigned char cali_scale =0;
unsigned long int temp =0;
unsigned char coefficient[8] ={0}; //test[8]={0};
//16位校驗和的臨時變量
unsigned int crcvalue =0;
AD_CS1;
cali_scale = command[2]; //獲取上位機發送的要校準的量程類型
eeprom_busy_wait();
eeprom_read_block( &coefficient[0], (void*)(ADDR_EEPROM_1+(cali_scale-1)*10), 8 );
crcvalue = checksum( &coefficient[0], 6 );
if( (coefficient[7]*256+coefficient[6]) != crcvalue )
{
readtimes++;
}
if( 1 == readtimes )
{
eeprom_busy_wait();
&nnbsp; eeprom_read_block( &coefficient[0], (void*)(ADDR_EEPROM_2+(cali_scale-1)*10), 8 );
crcvalue = checksum( &coefficient[0], 6 ); //
if( (coefficient[7]*256+coefficient[6]) != crcvalue )
{
readtimes++;
}
}
if( 2 == readtimes )
{
eeprom_busy_wait();
eeprom_read_block( &coefficient[0], (void*)(ADDR_EEPROM_3+(cali_scale-1)*10), 8 );
}
ADDR409_MASK;
AD_CS0;
_delay_us(5);
reset_AD7705();
write_AD7705_byte( WR_CLOCK_REG );
write_AD7705_byte( CLOCK_REG_SET );
if( ZERO_CALIBRATION == command[3] ) //校準命令為零校準
{
write_AD7705_byte( WR_SETUP_REG );
write_AD7705_byte( text_of_setup[cali_scale-1] | SYS_ZERO_CALI);
//等待校準完成
start_timer0();
while( time_count 《 time_sys_cali );
stop_timer0();
while( AD_DRDY );
//讀OFFSET寄存器
write_AD7705_byte( RD_OFFSET_REG );
temp = read_AD7705_dword();
if( cali_scale == scale)
{
ZS = temp; NO_CALI_TYPE = NO_FULL_CALIBRATION;
}
coefficient[0] = (unsigned char)( temp%256 );
coefficient[1] = (unsigned char)( (temp/256)%256 );
coefficient[2] = (unsigned char)( (temp/65536)%256 );
}
else if( FULL_CALIBRATION == command[3] )
{
temp = (unsigned long int)(coefficient[0]) + (unsigned long int)(coefficient[1])*256
+ (unsigned long int)(coefficient[2])*65536;
write_AD7705_byte( WR_OFFSET_REG );
write_AD7705_dword( temp );
write_AD7705_byte( WR_SETUP_REG );
write_AD7705_byte( text_of_setup[cali_scale-1] | SYS_FULL_CALI );
//等待校準完成
start_timer0();
while( time_count 《 time_sys_cali );
stop_timer0();
while( AD_DRDY );//
//讀FULL寄存器
write_AD7705_byte( RD_FULL_REG );
temp = read_AD7705_dword();
if( cali_scale == scale )
{
GS = temp;
NO_CALI_TYPE = ALREADY_CALIBRATION;
}
coefficient[3] = (unsigned char)( temp%256 );
coefficient[4] = (unsigned char)( (temp/256)%256 );
coefficient[5] = (unsigned char)( (temp/65536)%256 );
}
else
{
AD_CS1;
_delay_us(5);
return;
}
AD_CS1;
_delay_us(5);
crcvalue = checksum(&coefficient[0],6);
coefficient[6] = (unsigned char)(crcvalue%256);//
coefficient[7] = (unsigned char)(crcvalue/256);
eeprom_busy_wait();
eeprom_write_block( &coefficient[0], (void*)(ADDR_EEPROM_1+(cali_scale-1)*10), 8 );
eeprom_busy_wait();
eeprom_write_block( &coefficient[0], (void*)(ADDR_EEPROM_2+(cali_scale-1)*10), 8 );
eeprom_busy_wait();
eeprom_write_block( &coefficient[0], (void*)(ADDR_EEPROM_3+(cali_scale-1)*10), 8 );
Txout( &coefficient[0] );//輸出校準數據給上位機
return;
}
//
void start_AD7705(void)
{
reset_AD7705();
//寫OFFSET寄存器
write_AD7705_byte( WR_OFFSET_REG );
write_AD7705_dword( ZS );
//寫滿量程校準寄存器
write_AD7705_byte( WR_FULL_REG );
write_AD7705_dword( GS );
//CLOCK寄存器設置,無分頻,50HZ輸出更新速率
write_AD7705_byte( WR_CLOCK_REG );
write_AD7705_byte( CLOCK_REG_SET );
//寫設置寄存器
write_AD7705_byte( WR_SETUP_REG );
write_AD7705_byte( text_of_setup[scale-1] );
start_timer0();
while( time_count 《 time_read_data );
stop_timer0();
}













 工商網監
工商網監
評論