 電子發燒友App
電子發燒友App


由于異步電機的動態數學模型是一個高階、非線性、強耦合的多變量系統。上世紀60年代末由達姆斯塔特工業大學(TU Darmstadt)的K.Hasse提出。在70年代初由西門子工程師F.Blaschke在不倫瑞克工業大學(TU Braunschweig)發表的博士論文中提出三相電機磁場定向控制方法,通過異步電機矢量控制理論來解決交流電機轉矩控制問題。矢量控制實現的基本原理是通過測量和控制異步電動機定子電流矢量,根據磁場定向原理分別對異步電動機的勵磁電流和轉矩電流進行控制,從而達到控制異步電動機轉矩的目的。
永磁電動機工作的時候,定子繞組的電壓、電流、磁鏈等物理量都是隨時間變化的,分析這些個電氣量時,我們常用時間相量來表示。而每個繞組的空間位置也使得他們的變化比僅僅與時間有關,也與空間位置有關。
當我們考慮到它們所在繞組的空間位置,就可以如下圖所示的空間向量來表示這些量。而我們說的矢量指得是定子電壓、電流、磁鏈等空間矢量。該類矢量通過三相定子變量合成得到。
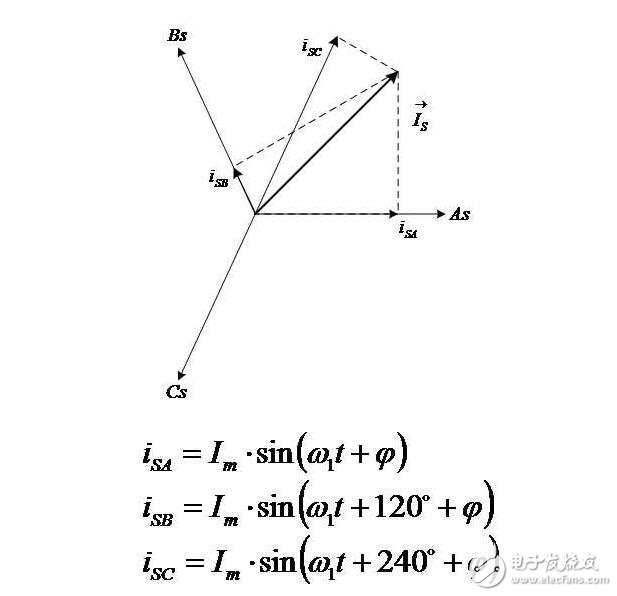
合成定子電流矢量就是:

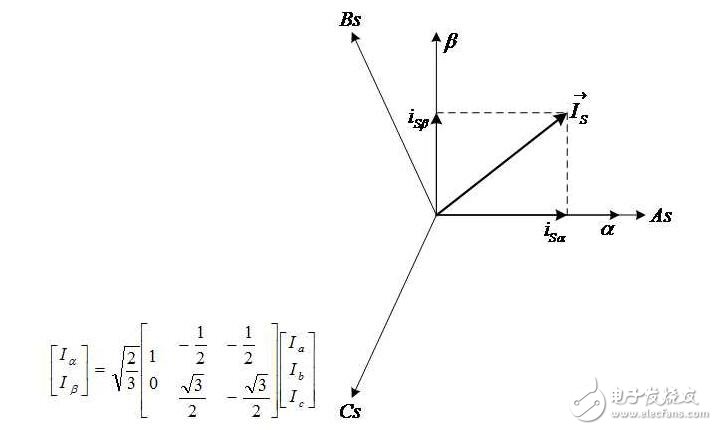
二、矢量控制坐標變換
3相/2相變換(Clarke變換):根據變換前后功率不變的約束條件,以定子電流為例:
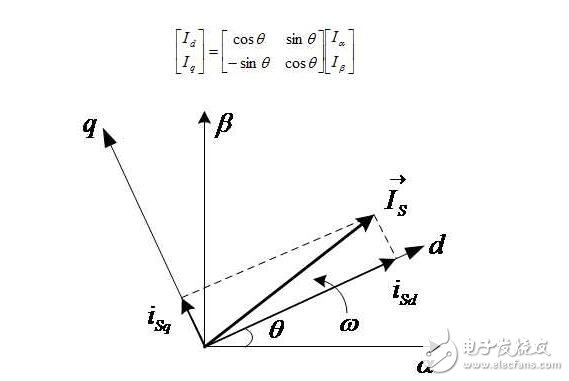
旋轉變換(Park變換):根據變換前后功率不變的約束條件,同樣以定子電流為例:
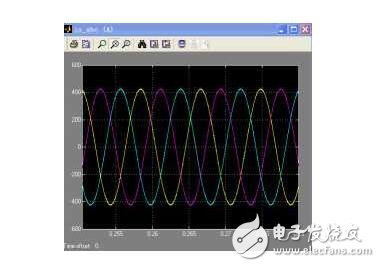
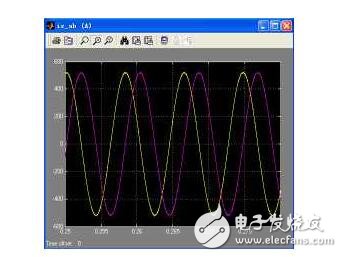
在SIMULINK中搭建模型,三相定子電流是下面這樣的:
Clarke變換之后的電流是這樣的:
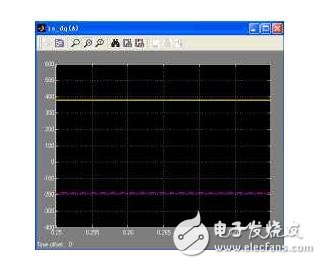
Park變換之后的定子電流是這樣的:
三、矢量控制的基本思想
矢量控制是一種高性能交流電機控制方式,它基于交流電機的動態數學模型,通過對電機定子變量(電壓、電流、磁鏈)進行三相/2相坐標變換,將三相正交的交流量變換為兩相正交的交流量,再通過旋轉變換,將兩相正交的交流量變換為兩相正交的直流量,采用類似于他激直流電機的控制方法,分別控制電機的轉矩電流和勵磁電流來控制電機轉矩和磁鏈,具有直流電動機類似的控制性能。
四、矢量控制的基本方法
Id=0控制;
最大轉矩/電流比控制;
恒功率弱磁控制;
最大功率控制;
1、Id=0控制:
id=0時,從電動機端口看,相當于一臺它勵直流電動機,定子電流中只有交軸分量,且定子磁動勢空間矢量與永磁體磁場空間矢量正交等于90°,電動機轉矩中只有永磁轉矩分量,其值為
此時,反電動勢相量與定子電流相量同相。對表面凸出的轉子磁路結構的永磁同步電動機來說,此時單位定子電流可獲得最大的轉矩。或者說在生產所需要轉矩的情況下,只需最小的定子電流,從而使銅耗下降,效率有所提高。這也是表面凸出示轉子磁路結構的永磁同步電動機通常采用這種方式控制的原因。
2、最大轉矩/電流比控制
最優轉矩控制,也稱定子電流最小的控制,或稱為最大轉矩電流控制,是指在轉矩給定的情況下,最優配置d, q軸的電流分量,使定子的電流最小,即單位電流下電機輸出轉矩最大的矢量控制方法。
該方法可以減小電機的銅耗,提高運行效率,從而使整個系統的性能得到優化。此外,由于逆變器所需要輸出的電流比較小,對逆變器容量的要求可相對的降低。
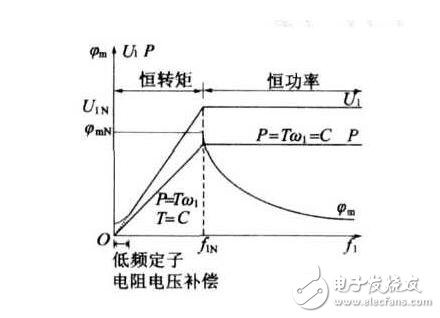
3、恒功率弱磁控制
對于傳統的電勵磁電機而言,弱磁控制是較容易實現的。但是對于永磁電機(如永磁同步電動機、永磁無刷直流電動機)而言,永磁體一旦裝在電機內就不能夠拆卸下來,而且它所產生的磁場大小是恒定的。這時要想弱磁只有利用電機的電樞反應。
永磁同步電動機的轉子勵磁固定不變,永磁場產生的反電勢和速度成正比,當電機端電壓隨轉速升高到逆變器能夠輸出的最大電壓(在這之前是恒轉矩運行區域)之后,繼續升高電機的速度時永磁同步電動機將無法再作恒轉矩運行,而必須維持電樞繞組的電勢平衡,從而獲得一個新的電機調速運行范圍(恒功率弱磁運行區域)
4、最大功率因數控制
其特點是電機的功率因數恒定為1,逆變器的容量得到了充分的利用,但該方法所能輸出的最大轉矩比較小。
五、矢量控制的配件
2、SVPWM變換器
3、傳感器
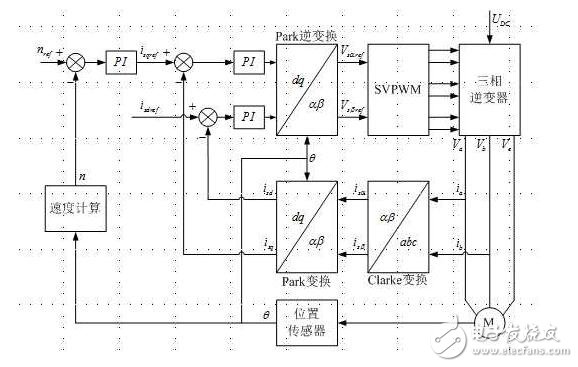
一個經典永磁電機矢量控制系統結構:











 工商網監
工商網監
評論