mpu6050常用作提供飛控運行時的姿態測量和計算。本文首先介紹了MPU6050姿態解算的原理,其次詳細的介紹了mpu6050姿態解算程序。
2018-03-09 09:15:24 41330
41330 MPU6050姿態融合解算(DMP)
2021-12-06 13:21:10 32
32 MPU6050模塊自己寫 卡爾曼濾波和姿態解算 難嗎? 大概多久能搞出來?
2017-12-22 17:35:23
本文主要介紹了mpu6050姿態解算原理分析及程序設計,MPU6050硬件DMP解算姿態是非常簡單的,四元數法只求解四個未知量的線性微分方程組,計算量小,易于操作,是比較實用的工程方法。
2017-12-11 13:51:3441050 
MPU6050簡介什么是MPU6050MPU6050的特點MPU6050框圖MPU6050初始化MPU6050—DMP使用介紹MPU6050—DMP使用DMP驅動庫驅動代碼硬件連接
2021-12-06 11:51:1166 本文為大家分享了mpu6050六軸傳感器模塊驅動程序源代碼,STM32F1讀取MPU6050的加速度和角度傳感器數據的初始化步驟,以及MPU6050DMP初始化函數、DMP姿態解算后的俯仰角、橫滾角和航向角。
2017-12-11 14:26:5234513 
本文開始闡述了卡爾曼濾波的概念,其次闡述了卡爾曼濾波的性質與卡爾曼濾波的應用,最后介紹了mpu6050卡爾曼濾波分析及mpu6050卡爾曼濾波輸出姿態角程序。
2018-03-09 08:57:3170608 
MPU6050程序,想了解、想要的小伙伴趕緊看看哦!
2015-12-15 13:51:5837 本程序是基于Mpu6050,所做的四元數結算 相當穩,希望對大家有所幫助
2016-08-17 10:36:5590 文章目錄1 簡介2 MPU60503 工作原理4 單片機與MPU6050通信4.1 mpu6050 數據格式4.2 傾角計算方法5 實現代碼6 最后1 簡介Hi,大家好,這里是丹成學長,今天向大家
2021-12-06 12:51:109 C語言 | 基于STM32的MPU6050模塊程序(主程序)
2021-12-06 15:06:1245 移植正點原子mpu6050代碼,總是MPU6050初始化失敗解決首先觀察正點原子MPU6050代碼,發現它在讀取MPU6050數據的同時,還將數據通過串口發送給上位機進行調試,而我們移植
2021-12-06 11:51:1237 MPU6050(硬件IIC)MPU6050(硬件IIC)
2017-04-02 16:29:3070 MPU6050的DMP自檢與姿態換算的問題
2021-12-06 16:51:1116 MPU6050陀螺儀使用( 原理圖代碼 )
2015-10-29 15:24:4690 最近在研究小四軸的飛行,姿態檢測主要用到的傳感器是MPU6050。從MPU6050讀出來的加速度和角速度數據最后要轉成姿態,可以轉換成歐拉角(偏航角、俯仰角和滾轉角)或四元數表示,為了減少計算量(歐拉角涉及正弦運算,運算量相對較大),方便在STM32主控上實現,可以轉換成四元數表示。
2017-11-07 10:39:3017853 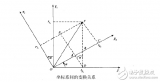
mpu6050詳細源碼,配有電路圖以及初始化C語言程序。詳細的mpu6050中文資料!
2016-02-18 11:53:2090 MPU6050( )
2021-12-06 15:06:1123 MPU6050使用互補濾波與卡爾曼濾波算法進行姿態解算
2023-08-07 15:46:561 對于大多數MPU6050的應用來說,獲取到的原始數據并沒有多大用處,我們需要對原始數據進行姿態融合解算,最終得到姿態數據,也就是三個歐拉角:航向角(yaw)、橫滾角(roll)和俯仰角(pitch)。
2023-06-15 15:03:39884 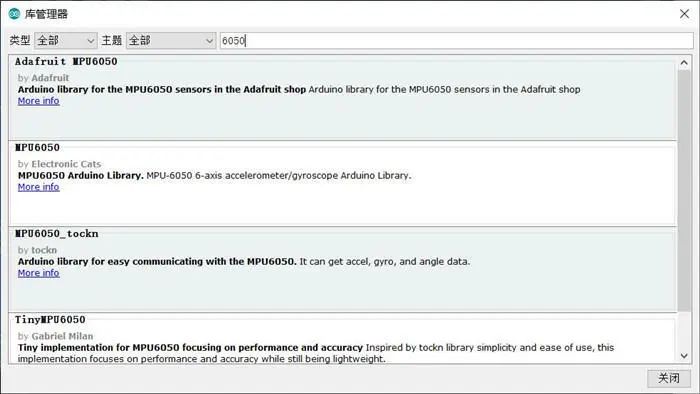
軸當前的姿態. 所以,MWC的源程序里面也就沒有使用 MPU6050的 DMP進行計算姿態. 筆者為了計算做產品. 研究了很長時間的MWC源程序始終沒看懂. 后來不得已.最終在同事的勸說下.鼓起勇
2021-12-06 16:51:101 MPU6050 MPU6050 內部整合了 3 軸陀螺儀和 3 軸加速度傳感器,并且含有一個第二 IIC 接口,可用于連接外部磁力傳感器,并利用自帶的數字運動處理器(DMP: Digital
2021-12-06 15:36:096 MPU6050 MPU6050 內部整合了 3 軸陀螺儀和 3 軸加速度傳感器,并且含有一個第二 IIC 接口,可用于連接外部磁力傳感器,并利用自帶的數字運動處理器(DMP: Digital
2021-12-06 12:06:080 為避免糾纏于電路細節,我們直接使用集成的MPU6050模塊。MPU6050的數據接口用的是I2C總線協議,因此我們需要Wire程序庫的幫助來實現Arduino與MPU6050之間的通信。請先確認你的Arduino編程環境中已安裝Wire庫。
2017-11-07 14:25:066679 InvenSense公司的三軸陀螺儀MPU6050測試程序。IIC接口,51單片機驅動,LCD1602同步顯示。
2017-11-07 14:01:265584 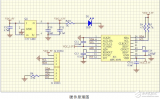
本文開始介紹了mpu6050的定義和mpu6050的感測范圍,其次闡述了mpu6050特征,最后介紹了mpu6050與單片機的連接方法。
2018-03-09 08:42:3325602 MPU6050 相關資料 源程序 原理圖
2015-11-11 11:48:3933 # MPU6050常見問題的分析與處理本文主要針對STM32使用MPU6050過程中產生的問題進行分析和處理,部分內容也適用于其他單片機。本文基于MPU6050自帶的DMP算法。文章內容對于MPU6050調試過程有一定的幫助。
2021-12-06 12:21:0639 MPU6050 用51單片機串口測試程序,通過1602顯示數據
2016-04-28 14:57:0932 MPU6050使用卡爾曼濾波的方法介紹,使用卡爾曼濾波獲得的姿態角更準確
2016-06-01 11:29:20145 下載,在公眾號:小白學移動機器人,發送:MPU6050,即可獲得。2.4.1 解決的問題DMP庫的移植(文件已被更改過,更好的移植)MPU6050數據的獲取(通過DMP獲取的四元數,做姿態解算)零偏
2021-12-06 12:06:0733 ——來自迪文開發者論壇用戶本方案使用COF屏的IO口模擬I2C信號與MPU6050通訊,實現航空姿態儀表可視化顯示。MPU6050采集數據,T5L0芯片進行數據讀取和濾波算法處理,計算出姿態數據
2022-05-31 11:30:30536 
MPU6050模塊,如圖 1所示。該模塊集成了一片MPU6050芯片和一片STM8S003F3P6單片機,具有串口和I2C接口。MPU6050中的DMP(數字運動處理器)對姿態進行融合,STM8
2017-11-07 14:06:4113602 MPU6050數據手冊,規格說明
2022-03-09 15:03:5482 電子發燒友網站提供《MPU6050教程開源分享.zip》資料免費下載
2023-06-25 15:18:144 本文檔的主要內容詳細介紹的是使用Arduino讀取MPU6050數據的程序免費下載。
2019-07-24 17:17:3927 10 9 8,再對應位置b.移位n*42.將配置的GPIO口更改一下百度網盤mpu6050代碼 2222...
2021-12-06 15:51:084 前段時間由于項目需要,需要使用cc2530通過IIC讀取MPU6050的數據。發現網上并沒有代碼,很多帖子都不是大家需要的,所以我想把我的cc2530驅動MPU6050的代碼粘出來與大家共同學習。我
2021-12-06 16:51:1035 文章目錄硬件環境頭文件代碼源文件代碼簡單舉例硬件環境MPU6050.SCL->接STM32F407.PB8MPU6050.SDA->接
2021-12-06 11:51:1212 本文開始對mpu9150進行了介紹,其次介紹了mpu6050的定義、mpu6050感測范圍以及mpu6050的特征,最后闡述了mpu9150和mpu6050區別。
2018-03-08 10:07:1140722 MPU6050原理圖,PDF格式,還蠻清晰。
2016-03-24 17:25:3797 四路dmp的mpu6050的STM32F103程序
2017-02-28 21:08:1013 本文檔的主要內容詳細介紹的是MPU6050 DMP的使用程序詳細資料免費下載。
2018-11-01 16:19:35111 STM32 MPU6050 平衡車
2021-12-06 14:51:1057 MPU6050開發 -- 數據分析
2021-11-30 11:21:0422 使用MPU6050硬件DMP解算姿態是非常簡單的,下面介紹由三軸陀螺儀和加速度計的值來使用四元數軟件解算姿態的方法。我們先來看看如何用歐拉角描述一次平面旋轉(坐標變換):MPU6050的四元數解算
2021-12-06 12:36:0623 STM32獲取MPU6050數據
2021-12-06 13:06:1646 畢業論文 | 基于MPU6050及卡爾曼濾波的平衡小車設計(源代碼與設計文檔)
2021-11-21 20:06:0920 MPU6050基于STM32,程序中加入MPU的官方庫DMP,計算出歐拉角,可在串口助手中觀察歐拉角的變化
2017-03-01 12:48:3757 最新MPU6050資料V5,包括上位機,PCB庫,示例程序(PC版,STM32,Arduino版)
2016-06-22 16:28:2826 本文開始介紹了mpu6500的定義與MPU6500驅動總結,其次闡述了mpu6050的定義與mpu6050感測范圍,最后介紹了mpu6500和mpu6050的區別。
2018-03-08 09:54:0286385 本文檔的主要內容詳細介紹的是采集MPU6050 DMP數據功能的C語言程序免費下載,對于 MPU6050和自帶的DMP數據讀取迷茫的小伙伴可以了解一下。
2018-12-10 08:00:0024 畢業論文 | 基于STM32的MPU6050程序設計(源碼)——卡爾曼濾波
2021-12-06 12:06:0839 MPU6050資料,有關MPU6050的介紹。
2015-12-10 18:20:1232 下載,在公眾號:小白學移動機器人,發送:MPU6050,即可獲得。2.4.1 解決的問題DMP庫的移植(文件已被更改過,更好的移植)MPU6050數據的獲取(通過DMP獲取的四元數,做姿態解算)零偏自動...
2021-12-06 17:06:1016 ,從無到有,包含了一些我調試代碼的過程。分享一些坑吧,很多都是讀不出來啥的,其實模塊一般沒啥問題,我會一步一步地教大家怎么排除常見問題。我是參考正點原子的代碼,因為他們沒教怎么移植DMP簡述一下mpu6050和stm32的一些坑吧TB上mpu6050也不貴,就那么幾塊錢,模塊幾乎都一模一樣
2021-12-06 12:36:0714 將數據通過串口發送到計算機,每一組數據50ms。本操作過程簡單,方便移植.0.96寸IIC顯示屏接PA5:SCK,PA7:SDA,陀螺儀接PB6/7,串口為PA9/10,本程序代碼開源。 STM32讀取MPU6050角度
2021-12-06 12:21:0737 電子發燒友網站提供《使用MPU6050平衡LED項目.zip》資料免費下載
2023-02-08 15:34:054 本文檔的主要內容詳細介紹的是MPU6050傳感器的源代碼合集免費下載。
2020-01-03 16:22:2945
 電子發燒友App
電子發燒友App









 工商網監
工商網監
評論