 電子發燒友App
電子發燒友App


本項目介紹的是太陽能衛星機器人,同樣是采用太陽能脈動充放電控制電路,但是卻是另外一種全新的運動方式——以陀螺旋轉的方式移動,所以又稱為太陽能陀螺機器人。
如果了解BEAM機器人的朋友,可能對這樣造型的機器人已經很熟悉了——三腳支架中的兩腳,加上連接電機的底部轉盤,總共三點支撐地面,曬會太陽充會電,電機驅動轉盤轉動再帶動機器人移動。
一、基本原理
1.1、驅動原理
1.2、機械結構
1.3、電路原理
二、準備工作
三、制作過程
3.1、電路焊接
3.2、三腳支架
3.3、電 路 板
3.4、電機支架
3.5、整機組裝
3.6、整機調試
四、效果展示
五、擴展完善
5.1、功能擴展
5.2、版本升級
六、常見問題
七、項目總結
從以上插圖我們可以看到兩種不同的造型,不過原理都是基本一樣的,只不過結構上有一點區別(有一個帶了碰撞環,這個后面會具體說明)。
一、基本原理
本項目的機器人的外形像一個人造衛星,是以太陽能電池作為電源,電機驅動底部的轉盤轉動,從而帶動整個機器人移動。由于以自身轉動的方式進行移動的,就像一個旋轉的陀螺,所以本項目機器人又可稱為“陀螺機器人”。
1、驅動原理
本項目的驅動原理也是比較簡單的,主要是電機帶動底部的轉盤轉動——機器人有一個三腳支架,同時只有相鄰的某兩腳支撐地面,再加上底部連接電機的轉盤,“兩腳+轉盤”——三點支撐地面。電機帶動轉盤轉動,則其中一點轉動,另外兩點支撐,機器人就可以整體移動。
2、機械結構
本項目機器人有一個三腳支腳,主要有三種情況的結構,稍微通過調整就可以有不同的運行效果。
1、如果是三腳支架離地比較高(相對于轉盤),且底部用直徑比較小的轉盤,則三點平衡比較穩定,每完成一次充電周期后電機轉動只能帶動轉盤轉一點距離,一般只能是由一組相鄰的雙腳交換為下一組相鄰的雙腳支撐地面,每周期移動的距離比較小。
2、如果是三腳支架離地過高(相對于轉盤),則三點平衡相當穩定,雖然能夠帶動機器人移動,但是因為支架過高導致無法交換支撐地面的雙腳,就是說一直都是開始運動時默認支撐地面的雙腳著地。
3、如果是三腳支架離地比較低(相對于轉盤),以及底部用直徑比較大的轉盤,則三點平衡相對不夠穩定,每個充電周期后的運行可以接近平滑移動,也就是說每周期移動的距離相對會大一點。
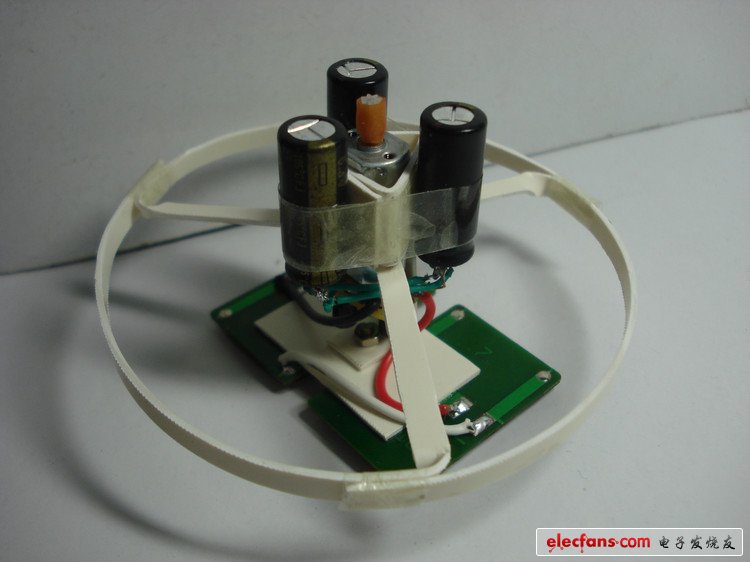
作為擴展的結構功能,本項目的機器人還可以增加一個“碰撞環”:用PVC剪成細條做一個環,再用三根細條支架固定在周圍一圈。本機器人加了“碰撞環”后,如果在轉動移動的過程中,碰到障礙物后會有一個反彈轉向的效果,之后再繼續轉動移動(具體見:版本升級)。

3、電路原理
本項目機器人的控制電路和PVC-2號機器人項目基本是一樣的——典型的脈動充放電電路。
但是兩者還是有一點區別:PVC-2號項目的電解電容是一個4700uF,而本項目的電路采用的是三個2200uF的電解電容。
三個電解電容并聯在一起,其容值就是三個電解電容之和,這樣本項目采用的電解電容其實就是6600uF,比PVC-2號的4700uF大一點。對于本脈動充放電電路來說,電解電容的容量越大,儲電量就會越大,但充電的時間也會越長,不過放電的時間也會越長,持續運動的時間也會越久。
當然,本項目之所以用三個電解電容并聯在一起代替原來的一個電解電容,主要還是因為機械結構的需要,即用三腳支架作為平衡支撐的結構。

基本原理如下:
1)太陽能電池板給電解電容充電,電解電容兩端的電壓不斷上升;
2)當電路電壓達到LED二極管的導通電壓(2V左右)時,LED二極管導通;
3)三極管9015的基極從導通的LED二極管獲得足夠的導通電壓,則三極管9015導通;
4)三極管9015導通后,又使三極管9014的基極獲得足夠的導通電壓,則三極管9014導通;
5)三極管9014導通后,電機獲得電流開始轉動;
6)電機轉動,消耗電解電容中存儲的電能,電路電壓下降;
7)當電路電壓下降到低于LED二極管的導通電壓時,LED二極管截止;
8)雖然三極管9015的基極失去了來自LED的導通電壓,但是由于此時三極管9014已經導通,導通后的電流除了提供給電機轉動之外,還通過電阻分流了一部分重新回到三極管9015的基極(形成一個循環),即三極管的基極還是有足夠的導通電壓;
9)當電機繼續轉動消耗電解電容的電能時,電路電壓進一步下降,則即便三極管9014導通后回流給三極管9015基極的電壓也無法保證三極管9015繼續導通(循環被破壞),則兩個三極管都截止,電機停止轉動;
10)電解電容重新充電,繼續重復上面的各環節。
簡單的說,即:太陽能電池對電解電容充電,當充電量達到由LED二極管設置的充電上限后,則電路開始瞬間放電提供給電機轉動;雖然電機轉動消耗電能使電壓下降至低于LED二極管的下限,但是由于電路存在一個導通循環的機制,仍然會繼續放電讓電機轉動,能夠盡可能的把電解電容中存儲的電能都消耗掉;消耗完電解電容中的電能后,重新由太陽能電池對其進行充電……如此循環往復。
也可以這樣理解:太陽能電池對電解電容進行緩慢充電(太陽能電池的電流比較小),充電達到上限后對電機進行瞬間放電(電機的電流比較大);放電停止的下限比較低,可以比較徹底的把充電的電量消耗完。
在PVC-Robot 2號機器人的項目中已經對該電路原理進行了更詳細的分析,這里不再重復。如果還有不清楚的,或者有興趣繼續了解的,可以點擊這里:PVC-Robot 2號 電路原理分析。
二、準備工作
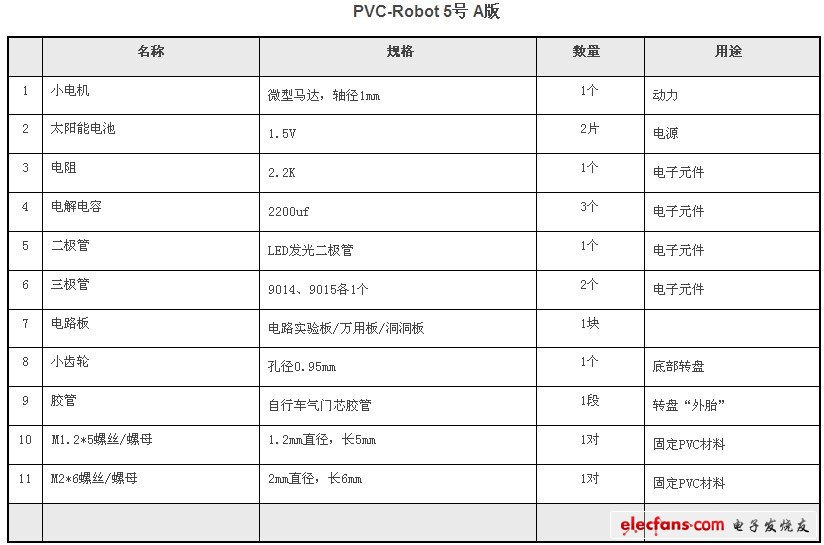
本項目需要的器材主要包括:PVC線槽、小型電機(馬達)、太陽能電池、電阻、電解電容、二極管、三極管、螺絲/螺帽等。
本項目采用的PVC線槽沒有具體的規格要求。
以下列出本項目的主要器件:
三、制作過程
以下將按照制作的順序,全程介紹本項目機器人的制作過程。
3.1、電路焊接
本項目機器人的控制電路和PVC-Robot 2號機器人項目是一樣的,雖然一個是單個的大電解電容,一個是三只并聯在一起的小電解電容,但是電路板還是一樣的(電解電容可以外接)。
這是“電路板正面布局圖”(無焊點的一面,黑芯藍點為焊點,藍色帶代表焊點相連):
這是“電路板底面布局圖”(有焊點的一面,黑芯藍點為焊點,藍色帶代表焊點相連):
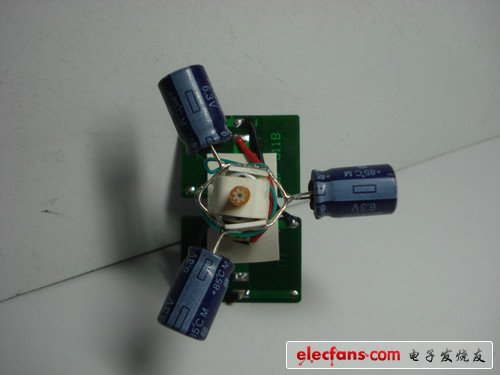
選讀內容——搭焊:
作為嘗試或者說作為進階,也可以省去電路板,直接對電子元件的引腳進行搭焊。
因為要圍繞電機直接搭焊,為了防止電機的金屬外殼把電路給短路了,可以在外殼上包一圈透明膠布。
直接把電子元件直接焊在電機的電極上。
焊接好的電路。

搭焊電路的效果比較有粗放的藝術質感,而且不同的人可能焊接布局的方式不同,最終的效果也都不一樣,作為DIY來說會比較有個性。但直接搭焊對于焊接的技巧要求比較高,尤其是稍微復雜一點的電路不好把握好。正因為如此,在我們PVC教程中只是把搭焊作為一個附屬的“選修”內容。
電路調試
特別注意,本項目的太陽能機器人一般只能在太陽下才能運行,而在普通燈光下由于亮度不足將無法正常運行。如果要在室內測試太陽能機器人,由于光線不足就需要借助特別的燈光——可以選擇100瓦的白熾燈(在實體五金店中可以很容易買到燈泡和插座),以代替陽光。(注意:不能用一般日光燈或是節能燈,因為其亮度無法讓太陽能電池有足夠的輸出功率)。

在白熾燈下,進行電路測試。
正常效果,馬達會每隔幾秒鐘轉動幾下。調整白熾燈與太陽能電池板的距離,查看馬達在光線不同時的效果——光線越亮,馬達每兩次轉動的間隔就會越短,如果燈泡貼著太陽能電池板甚至馬達會持續轉動。
3.2、三腳支架
用三只電解電容做成三腳支架。
先把三只電解電容按下圖布局排好。

把電解電容的引腳折成如下圖形狀,把三只電解電容的電極分成兩層連在一起,注意正極的與正極連一起,負極與負極的連在一起。

把三只電解電容的電極并聯焊在一起。

3.3、電路板
電子電路是與前幾個項目一樣的太陽能脈動充放電控制電路,作為一個經典的電路基本上可以做成通用電路板,見下圖,其中LED發光二級管這次選擇黃色的。

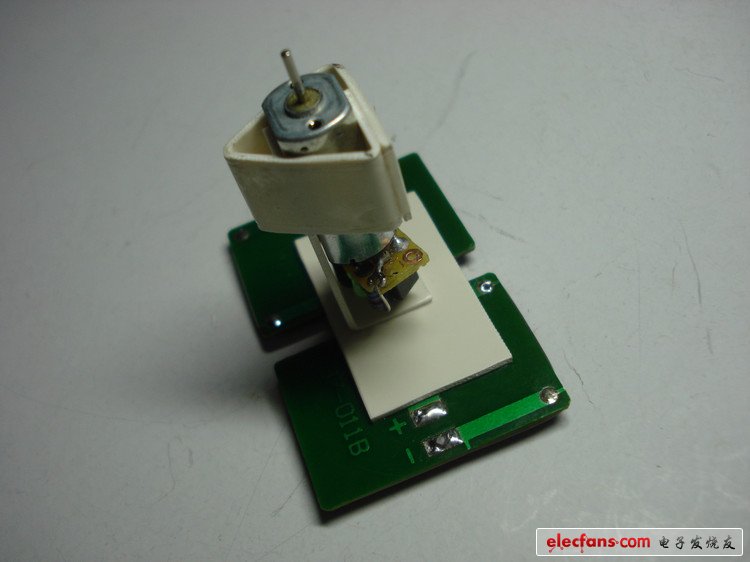
可以直接把電機的電極與電路板焊接在一起。具體焊接點需要對照之前的電路圖,而且讓電機的位置正好位于電路板中央位置。
對應到以下電路板底面圖中橙色圈所對應的焊點位置,把電機電極直接焊接在電路板上。

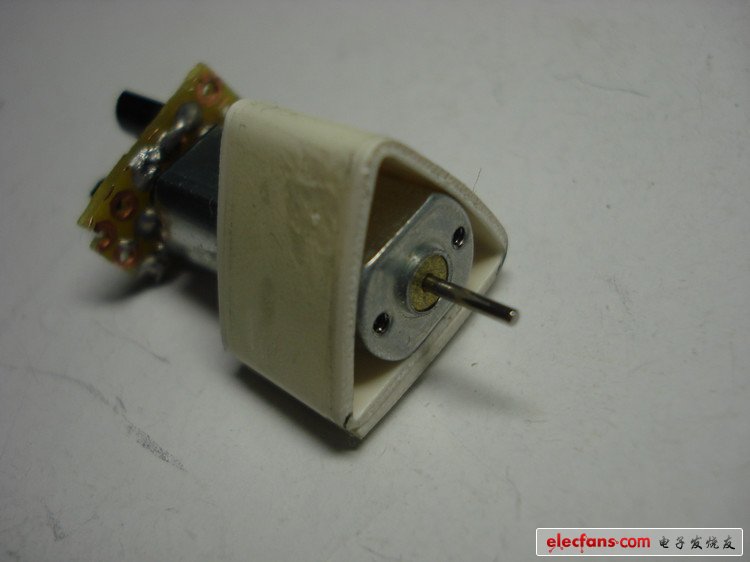
焊接好的電路板和電機。

3.4、電機支架
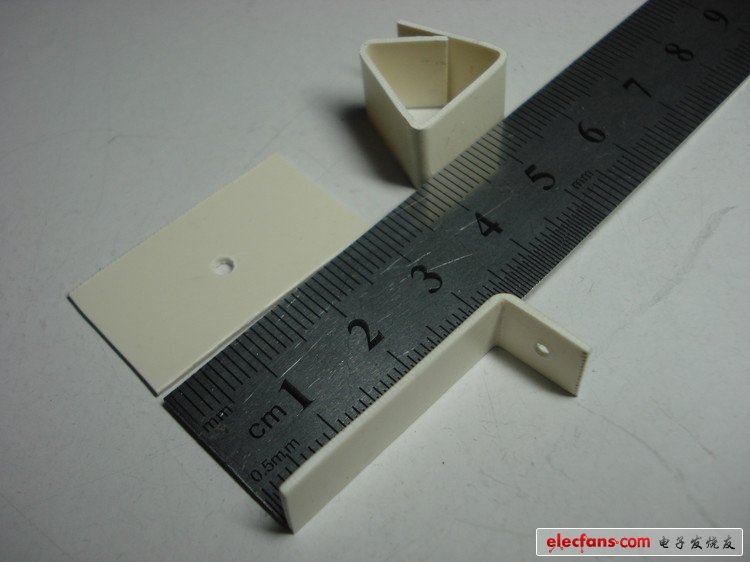
用剪刀把PVC材料剪裁并用尖嘴鉗折成一個電機的支架,如下圖所示。
3.5、整機組裝
開始整機組裝。
準備好所有的待組裝器件:太陽能電池板、太陽能電池板的支架、電機支架、電機以及電路板。

把電機、電機支架以及太陽能電池板用螺絲固定起來。

把太陽能電池板用雙面膠布固定在支架上,按照電路原理圖把電解電容以及太陽能電池板的電極用電線與電路板連接起來。同時把小齒輪安裝到電機上,并且在小齒輪上套上一截自行車氣門芯膠管(也可以省略)。

在電機支架外露的兩邊各插入一塊PVC方片,同時把電解電容的三腳支架插到電機支架上,并用尖嘴鉗調整三腳支架把電機支架正好夾住,并在兩個方片的靠近太陽能電池板的一側(沒有固定三腳支架的一側)用透明膠布包好,把方片固定在電機支架上。

用502膠水把三腳支架和電機支架粘貼在一起固定好來。
特別提醒:由于502膠水滲透性強,干得快,使用時要格外小心,如果沒有控制好用量,輕則會把不該粘住的東西粘起來了,嚴重的有可能會導致器件的損壞報廢,一般建議使用前先試一下會不會出水孔過大一次性會滴出過多膠水,必要的時候可以用牙簽之類的工具蘸著膠水涂到要粘貼的部位。

組裝完畢的機器人。
3.6、整機調試
完成整機組裝后,需要進行調試。
首先,測試電路是否正常工作,可以在100W白熾燈光下測試電路的充放電控制是否正常,電機是否能夠正常轉動(見視頻中在燈光下的效果)。

然后,調試機械結構,主要還是調試三腳支架的高度/角度。前面機械原理的章節已經提到通過調整三腳支架的高度(相對轉盤)對最終運行效果的影響。因為三腳支架已經粘貼在電機支架上,所以要調整三腳支架的高度,可以把三個電解電容的引腳往底部多折一點。
四、最終展示
最終效果展示。




五、擴展完善
5.1、功能擴展
除了調整三腳支架可以改變本機器人的最終運行效果外,還可以通過更換底部的轉盤改變運行效果,即可以把底部的小齒輪轉盤改為大齒輪轉盤。(具體可參見視頻中燈光下的大直徑轉盤部分的效果)。



5.2、版本升級
作為升級版本,本項目的機器人可以增加一個“碰撞環”:用PVC剪成細條做一個環,再用三根細條支架固定在周圍一圈。安裝了“碰撞環”之后,如果在轉動移動的過程中,碰到障礙物后會有一個反彈轉向的效果,之后再繼續轉動移動。
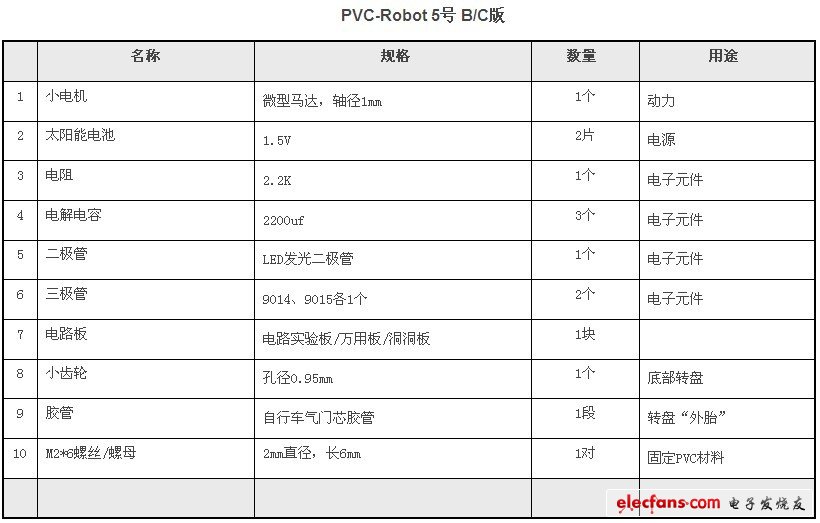
以下為一個升級版本的光能陀螺,帶“碰撞環”,并且結構部分重新作了設計,定名為“PVC-Robot 5號-B版”。具體運行效果可以見上面視頻中碰撞環的部分。

下面簡略的介紹一下制作過程。
材料準備和第一個版本是類似的,電路板也是直接焊接在電機電極上的,不過三個電解電容可以選擇形狀上稍微細長的類型,且引腳不需要很長的那種。

用剪刀和尖嘴鉗把PVC材料加工成如下圖所示的尺寸和形狀,下圖從上到下分別是電機支架、太陽能電池板底板/支架。注意電機支架做成邊長為15mm左右的等邊三角形。
把電機支架夾住電機外殼,并且用透明膠布從支架外圈綁幾圈固定好。
太陽能電池板支架的一端裁好,正好插入電機支架的三角空隙中。

用雙面膠布把太陽能電池板粘貼在太陽能電池板底板上。

把太陽能電池板的底板和支架用M2*6的螺絲/螺母固定好來。
用透明膠布把三個電解電容如下圖所示綁貼在電機支架周圍做成支架,并且給電機裝上小齒輪并在外面套一截自行車氣門心膠管做成底部轉盤(也可以只安裝小齒輪不用氣門芯膠管,運行效果會有不同)。注意電機軸突出要高過三個電解電容的底部,即讓底部轉盤要稍微高過三個電解電容做成的支架。

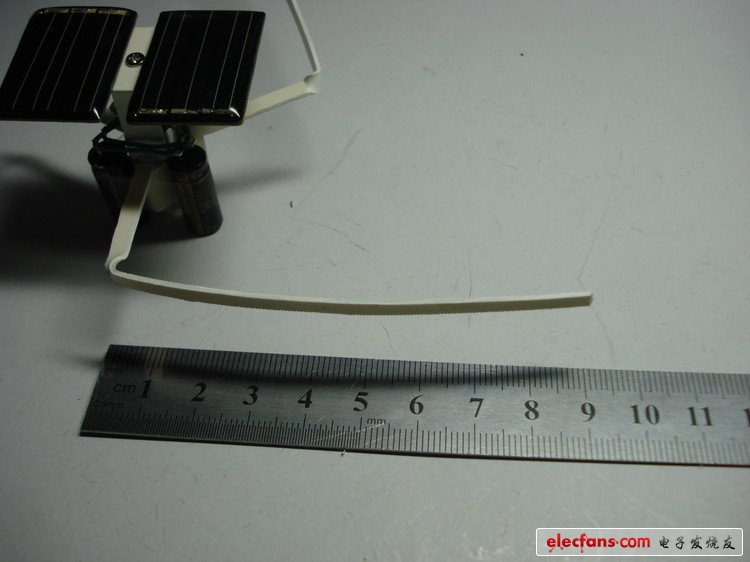
用PVC裁成細長條,其中一端折一個彎(用于直接插入三角形電機支架的三角空隙中),并且在30mm左右的長度再扭一個彎。

三根細長條都裝到電機支架的三角空隙(在接合部滴入用502膠水),并且都扭了彎,然后如圖所示保留大約90mm的長度。
特別提醒:由于502膠水滲透性強,干得快,使用時要格外小心,如果沒有控制好用量,輕則會把不該粘住的東西粘起來了,嚴重的有可能會導致器件的損壞報廢,一般建議使用前先試一下會不會出水孔過大一次性會滴出過多膠水,必要的時候可以用牙簽之類的工具蘸著膠水涂到要粘貼的部位。
三根長條如下圖所示彎成互相連接的圓弧,接合部用透明膠布固定。

連接好電路的電線。
完成后的效果。
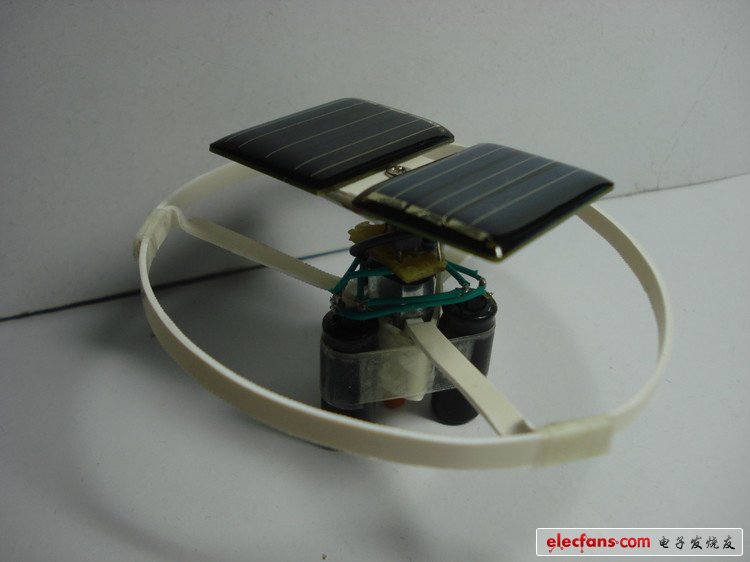

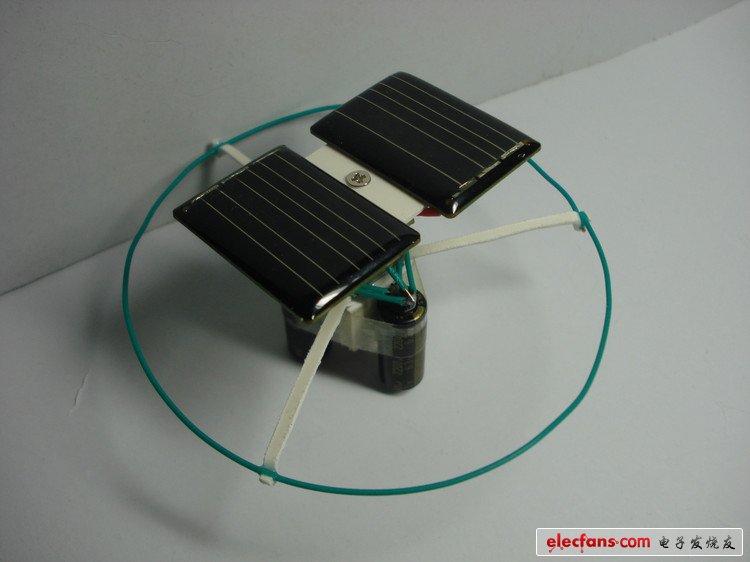
碰撞環也可以用細一點的金屬絲來做,重量更輕、彈性更好,以下是用單芯銅芯膠皮電線做的碰撞環(也可以考慮用網線內芯的銅線)。為便于區分定名為“PVC-Robot 5號-C版”。
用PVC做環的支架,把銅芯電線用502膠水粘貼在支架上。
特別提醒:由于502膠水滲透性強,干得快,使用時要格外小心,如果沒有控制好用量,輕則會把不該粘住的東西粘起來了,嚴重的有可能會導致器件的損壞報廢,一般建議使用前先試一下會不會出水孔過大一次性會滴出過多膠水,必要的時候可以用牙簽之類的工具蘸著膠水涂到要粘貼的部位。

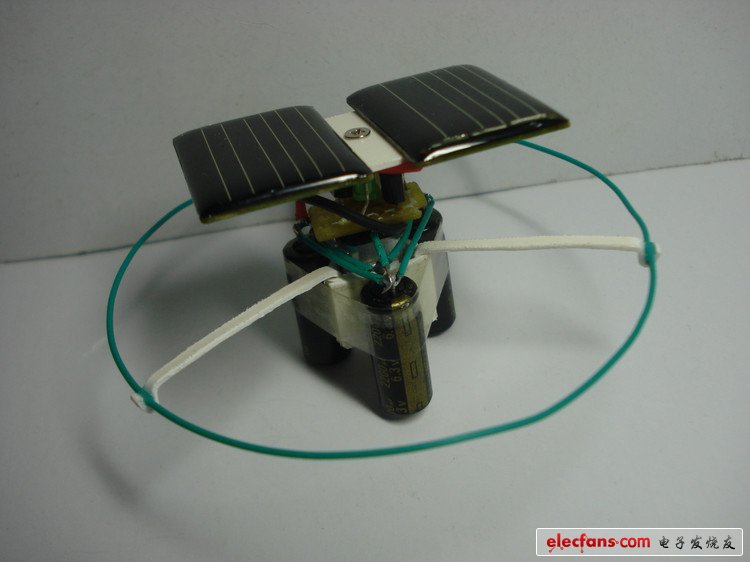
光能陀螺家族(依次為B版、A版、C版)。

六、常見問題
正常情況下,在陽光下測試,電機會有節奏的轉一陣、停一陣,注意觀察還會發現在電機開始轉動的瞬間LED會有一點微光閃動。
針對應用當前的太陽能脈動充放電控制電路制作太陽能動力機器人,以下列出可能存在的問題以及解決的方法:
1、電機轉一下就停止,電路不再觸發。
1)電機內阻太大:如果是小電流的電機,因為內阻比較大,電解電容充電分壓在LED兩側的電壓較低不足以讓LED導通,解決的辦法是可以嘗試在電機兩端并聯一個幾十歐姆的電阻。
2)如果是在強烈陽光下存在這個問題,則是太陽能電池板的電壓太高以及電機功率較小的原因:太陽能電池板電壓高,而電機功率小而消耗的電流也小,電機放電的速度趕不上太陽能充電的速度,導致三級管一旦導通后就無法截止,解決的辦法是可以嘗試在NPN三級管基極與PNP三極管集電極之間連接一個1k左右的電阻,使三級管導通的條件提高;另外也可以類似第一種情況在電機兩端并聯一個幾十歐姆的電阻,也就是說可以加大放電時的電流,加速放電。
2、電機一直轉動,沒有節奏性的轉/停。
1)太陽能電池板的電壓太高:嘗試多串聯一個LED以提高電路充電閾值上限(采用本教程對應淘寶店提供的套件一般不存在該問題)。
3、電機不轉,LED也不亮。
1)太陽能電池板的電壓太低:至少要求太陽能電池板額定最高電壓能夠達到3V(采用本教程對應淘寶店提供的套件一般不存在該問題);
2)光線不足:需要在足夠的陽光下或者白熾燈下進行測試;
3)電路錯誤:檢查電路焊接是否正確。
4、LED常亮,電路不觸發。
1)電路錯誤:檢查電路焊接是否正確。
5、電機嘶嘶響,但是不轉。
1)儲能電解電容容量過大:嘗試減小儲能電解電容的容量,根據經驗一般耐壓高、體積大的電解電容用在這個機器人電路上效果最好(采用本教程對應淘寶店提供的套件一般不存在該問題)。
七、項目總結
本項目是一個以簡單電子元件電路為控制基礎的智能機器人。對于剛入門的朋友,可以通過這個項目:
1、加深脈動充放電控制電路在太陽能驅動應用方面的理解;
2、了解電容并聯的應用;
3、了解太陽能陀螺結構的原理以及應用;
4、初步了解電子元件的搭焊。
本項目的機械結構也比較特殊,建議有條件的朋友可以試試手作為一次實踐經歷。
以下為效果視頻,前一段是在燈光(白熾燈)下進行測試的效果(包括帶碰撞環的效果),后面一段為在陽光下的效果。













 工商網監
工商網監
評論