 電子發燒友App
電子發燒友App


摘要:車載HMI是人與車輛之間的關鍵設備,使人能夠對車輛的運行實現控制;設計了一種觸摸控制與數字顯示合理結合的車載HMI終端,采用ARM 作為處理器,通過移植Qt/E對系統加以實現;該終端通過在Polo車CAN總線試驗臺測試,實現了對基本設備的觸摸控制和車輛狀態信息的實時顯示,表明所設計的終端能夠滿足車載HMI的基本要求。
0 引言
改善HMI (Human Machine Interface)終端性能可降低車輛控制系統操作的復雜性,也可提高駕駛員對自己車輛的控制力。車載HMI通過單一結構中控臺,可以減少零部件數量,提高性價比。傳統機械式的控制終端正在逐步向直觀、便捷的HMI終端發展。2009年6月29日,美國汽車多媒體與通信研究服務公司Strategy Analytics發布最新研究報告,認為“車載人機界面市場領先者保持強勢地位”。報告預測,2015年,車載語音和觸摸屏市場規模將達到29 億美元。目前,HMI設備,尤其是語音、觸覺控制和觸摸屏,在汽車市場上被大量應用。
本文報告了一種基于觸摸控制與數字顯示理念的車載HMI終端,通過在ARM 上移植Qt/E接TFT-LCD觸摸面板加以實現。
1 系統結構介紹
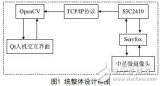
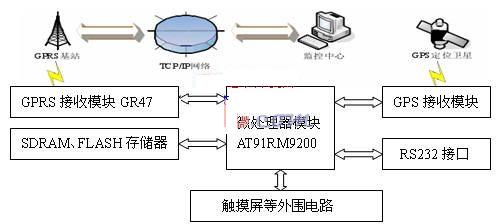
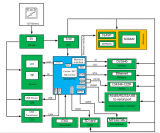
基于ARM 和Qt/E的車載HMI終端主要由兩個模塊組成,分別是ARM 處理器與觸摸顯示屏組成的HMI觸控平臺和CAN/RS232協議轉換器模塊。該終端可接入車載CAN網絡中實現車載設備的觸摸控制與狀態信息顯示。其結構框圖如圖1所示。
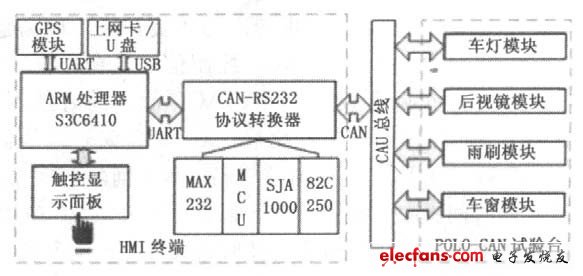
圖1 車載HMI終端結構
HMI觸控平臺主要是將Qt/E交叉編譯后移植到ARM 平臺,調用GUI在觸摸面板顯示。通過點擊觸控界面發送控制字,經CAN/RS232網關發送到CAN網絡中對各設備進行控制,同時實時采集各設備運行狀態參數并顯示,便于駕駛員及時了解車輛運行狀態。該平臺還預留了UART和USB端口分別可外接GPS模塊,無線上網卡或U 盤設備,實現導航、無線上網和多媒體播放功能。
CAN/RS232協議轉換模塊主要由MCU、CAN 接口與UART接口組成,其中CAN 接口采用CAN 控制器SJA1000和CAN收發器PCA82C250設計,RS232接口采用MAX232設計,以此實現兩種不同總線協議數據幀的透明轉換,是HMI終端與CAN網絡中各設備交互的紐帶。
車載CAN網絡模塊主要以Polo車CAN 試驗臺為平臺,試驗臺集成了車燈、電動車窗、雨刷和后視鏡CAN 節點模塊。
2 Qt/E在ARM 上的移植
Qt/E是Trolltech公司專為嵌入式Linux系統開發的圖像用戶界面(GUI)工具包。提供了窗口操作系統、開發環境、工作輔助應用程序和個性選項等,是基于C++ 可跨平臺的GUI應用程序框架;還提供給開發者建立藝術級GUI所需的功能,開發者可根據需求定制整個軟件解決方案。目前,眾多手機、PDA、機頂盒都采用Qt作為圖形引擎。因此,選擇了Qt/E作為HMI終端的開發工具。
2.1 交叉編譯環境的搭建
采用宿主機Fedora9.0作為開發平臺,移植ARM 版Qt/E4.7進行設計。因編譯Linux內核和Qt/E都需要交叉編譯工具鏈,交叉編譯器版本過高過低都會與Qt/E4.7不兼容,最終導致安裝失敗,所以一定要根據Qt的版本來選擇對應的編譯器。本系統采用arm-linux-gcc-4.5.1.安裝過程如下:
首先,解壓arm-linux-gcc-4.5.1安裝包,運行#tarxv*** arm-linux-gcc-4.5.1.tgz命令;然后將編譯器所在路徑加入系統環境變量,運行#gedit/root/.bashrc編輯該文件,修改最后一行為export PATH=PATH:/usrt/local/arm/4.5.1/binPATH,此時交叉編譯器已經安裝好;最后執行#arm-linux-gcc-v顯示編譯器版本信息,驗證是否安裝成功。
2.2 Qt/E4.7的編譯與移植
減壓ARM 版Qt/E安裝包到指定目錄,然后進入該目錄執行編譯配置源碼命令#echo yes | 。/configure -opensource-embedded arm –xplatform qws/linux-arm-g++-no-webkit-qt-libtiff-qt-libmng-qt-mouse-tslib-qt-mouse-pc-no-mouse-linuxtp-no-neon.其中編譯ARM 平臺的embedded版本配置參數為embedded arm,使用arm-linux交叉編譯器進行編譯為xplatform qws/linuxarm-g++,qt-mouse-tslib是使用tslib來驅動觸摸屏。然后執行make命令進行編譯,當編譯完成之后執行安裝命令make install.最后把安裝文件打包#tar cv*** qt4.7.tgz,下載到ARM 開發板,并解壓到指定目錄。至此Qt/E在ARM 開發板上移植完成。
安裝Linux環境下X86版Qt SDK軟件-Qt Creator2.0進行Qt程序開發,設置為支持Qt4.7ARM 的交叉編譯。最后將設計好的程序通過編譯,生產二進制文件下載到ARM 開發板運行,以此實現HMI界面顯示功能。
3 車載HMI終端的硬件設計
3.1 CAN/RS232協議轉換器的硬件設計
CAN/RS232協議轉換器主要有主控制器、CAN接口模塊與RS232接口模塊組成,其中主控制器采用STC89C52單片機負責處理CAN總線與RS232總線的數據接收與發送,實現兩種不同協議數據幀的透明轉換與傳輸。
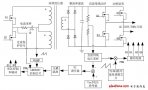
CAN接口模塊采用Philips公司的CAN 控制器SJA1000和CAN收發器PCA82C250芯片組成,主要實現CAN協議的物理層和數據鏈路層功能。其中CAN控制器完成數據鏈路層功能,實現與主控制器的信息讀寫操作,物理層通過CAN收發器實現電平轉換和傳輸。SJA1000的AD0~AD7與單片機P0口連接,實現地址/數據復用;片選/CS與P2.7相連,則基地址為0x7F00;/RD、/WD、ALE引腳依次與單片機各引腳相連;中斷/INT接單片機/INT0,因此可通過中斷方式對SJA1000進行實時訪問。SJA1000的MODE 引腳用于選擇CAN控制器在Intel模式還是在Motorola模式工作。由于STC89C52屬于Intel系列微控制器,故MODE引腳接+5V高電平設置為Intel模式,以滿足89C52的讀寫時序要求。為了增強節點的抗干擾能力,以及避免當CAN收發器失效時出現過流導致CAN控制器擊穿,SJA1000的TX0和RX0引腳通過光耦N6137后與PCA82C250的TXD和RXD連接,以此實現總線上節點間電器隔離;收發器CAN_H 和CAN_L引腳通過5Ω電阻與CAN總線端口連接起到限流作用;同時兩端接120Ω終端匹配電阻。
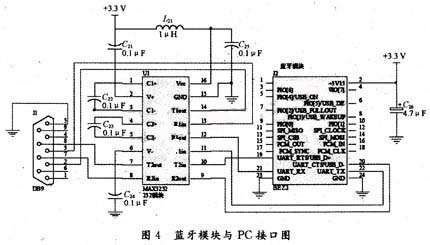
RS232接口電路采用MAX232芯片,實現單片機串口TTL電平與RS232電平相互轉換,完成HMI終端UART口的信息傳輸。STC89C52串口端(P3.0和P3.1)與MAX232的T1IN和R1OUT連接,T1OUT與R1IN接九針串口,然后通過交叉線與HMI終端連接實現數據通信。
3.2 車載HMI觸控平臺的設計
HMI觸控平臺以ARM 為處理器,接7.0寸LCD觸摸屏來實現,可取代傳統的(如圖2A)機械按鍵與表盤顯示的中控平臺。HMI觸控平臺如圖2B所示,由車燈、車窗、后視鏡、多媒體、空調、導航以及狀態參數顯示菜單組成。將該終端嵌入到方向盤,駕駛員可點擊觸控菜單進入車燈、車窗等控制界面(如圖2C和D)實現車燈、車窗等設備的觸摸控制,也可實時采集與顯示設備狀態參數如:車速、故障碼等。其中,觸控與顯示數據需調用ARM 底層串口驅動來實現讀寫操作,觸控界面通過Button控件的信號與槽機制來實現數據的發送,狀態參數的采集與顯示通過事件驅動方式實現。終端可外接GPS模塊實現導航功能,設計了Qt媒體媒體播放器實現娛樂功能,也可接入無線網卡來實現無線上網功能。
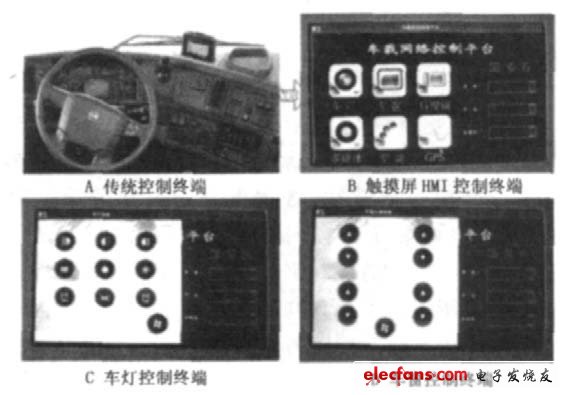
圖2 車載HMI終端
4 車載HMI終端的軟件設計
4.1 CAN/RS232網關軟件設計
主程序中首先要完成初始化操作, 包括單片機、SJA1000、RS232通信以及中斷源的初始化。其中SJA1000的初始化是整個設計最重要的部分,也是保證CAN 通信的前提。考慮車輛內部網絡的兼容性,SJA1000配置為Peli模式,支持CAN2.0A和B規范,實現標準幀和擴展幀兩種報文傳輸。SJA1000初始化寄存器配置流程如圖3所示。
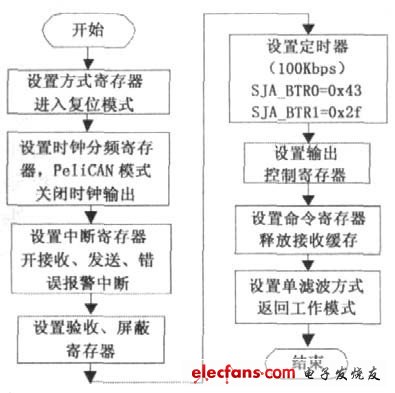
圖3 SJA1000初始化寄存器配置流程
為保證數據實時傳輸,采用中斷方式進行數據收發。
當CAN總線有數據接收時SJA1000會跳入接收中斷函數將數據接收并存儲到接收緩存,根據數據幀頭來判別數據類型和所帶數據長度,最后提取CAN 數據拆分為單字節通過串口發送,并在HMI終端顯示;當HMI終端有控制字發送,串口接收中斷函數將所發送的控制字依次接收存入接收緩存,并根據首字節來判別所發數據類型和長度,組裝成CAN數據幀格式發送到網絡中去,以此實現各節點的控制。具體流程如圖4所示。
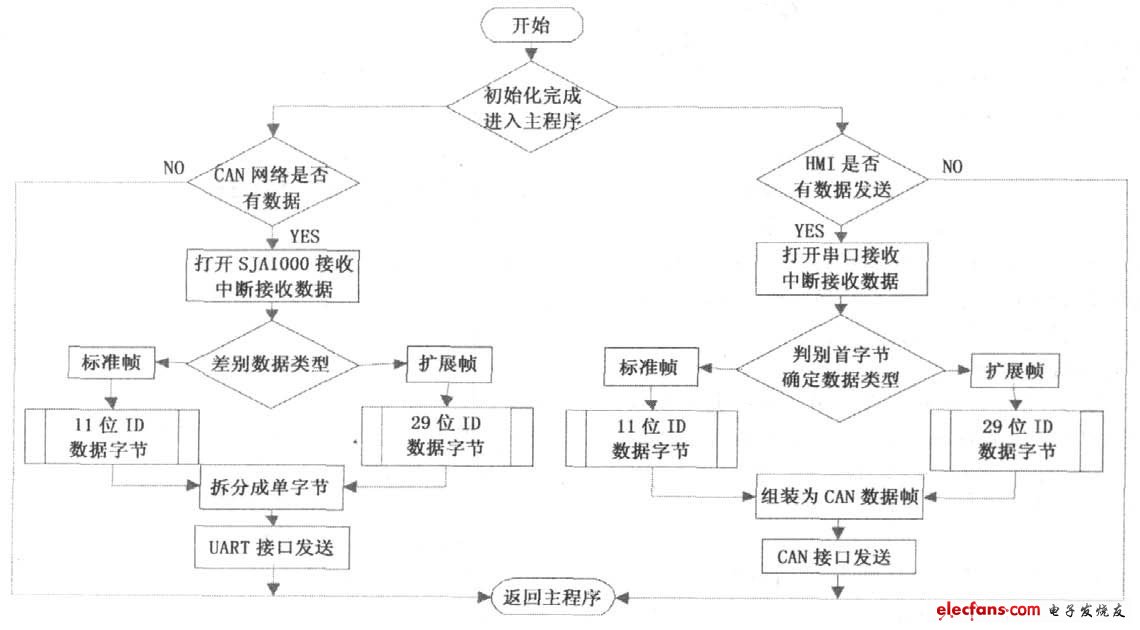
圖4 數據接收與發送流程圖
4.2 車載HMI界面的設計
HMI界面采用Qt Creator2.0來設計,因為HMI終端是通過UART接口接入CAN網絡中,所以通信時需接上面所介紹的CAN/RS232協議轉換器來實現。同時,還需在Linux下編寫Qt串口通信程序。
首先,在Linux下利用open函數打開串口設備,用tcsetattr函數來設置串口屬性。打開驅動設備UART0進行讀寫操作:const char*devName= “ /dev/ttySAC0”;fd = ::
open (devName,O_RDWR|O_NONBLOCK);設置波特率等參數:serialAttr.c_cflag= B115200| HUPCL| CS8|CREAD|CLOCAL;serialAttr.c_cc[VMIN]=1;其中串口設備可使用Linux下I/O函數進行Read和Write操作。但是,在數據接收時當數據量過大會導致界面被阻塞(造成界面假死),于是創建了一個線程通過事件驅動實現數據接收。
Qt中可采用QSocketNotifier類來實現設備事件驅動的設計要求。QSocketNotifier類關聯Signal/Slot機制,當有數據可讀時會觸發Ativated信號,LCD Number控件Slot會被調用來連接到該信號并顯示,從而實現數據采集與顯示功能。在數據發送時,可通過Button控件Signal/Slot調用QObject對象的connect()函數來實現[3]。當按鍵被按下時觸發Signal信號,Slot會調用pressed ()函數將定義好的數據通過串口Write函數發送到總線上。函數實現如下:
void Glass::on_lu_pressed(){char msg[]= {160,34,16,0};//定義所發送數據myserial-》myCom-》write(msg,4);//寫發送數據}
通過QPainter類進行對窗體界面和按鍵圖像界面進行設計,達到美觀的人機界面。最后將設計好的程序通過交叉編譯,生產二進制文件移植到ARM 中,然后在文件系統中調用執行,最終在LCD觸摸屏上顯示,如圖2所示。
5 系統集成與測試
首先將設計好的HMI終端通過交叉串口線與PC機連接,進行相互通信,測試是否能夠進行數據收發,測試成功后通過CAN/RS232網關接入Polo車CAN試驗臺進行綜合測試。試驗臺設備節點可通過觸摸方式控制,同時可實時采集與顯示運行狀態信息,經過多次實驗測試,運行穩定可靠,達到了設計要求。
6 結束語
本文所設計的車載HMI終端集車身控制、儀表顯示、導航、多媒體和無線上網為一體,簡化了車載中控平臺,降低了車輛控制系統操作的復雜性。經實驗測試實現了車身設備的觸摸控制,能夠對各設備運行狀態信息進行采集與顯示。為車載HMI開發提供了一種可行的設計思路與性價比更合理的解決方案。


















 工商網監
工商網監
評論