 電子發燒友App
電子發燒友App


針對目前交叉路口交通控制信號燈的綠信比固定不變的問題,提出一種模糊控制的方案。根據當前相位的車流量和當前相位與下一相位車流量之差,實時控制相位綠信比,縮減車輛在交叉路口的排隊長度。綠信比可在FPGA上模擬實現,采用E-Elements ISE Development Kit開發套件,使用ISE10.1軟件設計工具,對上述控制方案進行仿真。
1 概述
為了解決城市交通擁擠的問題,需要從供求兩個方面來采取措施:一是加強城市道路的基礎建設,二是要充分利用、提高現有路網的利用效率。目前,國內的城市交通燈大多數都是采用固定的綠信比(一個信號相位的有效綠燈時長與周期時長之比),不能滿足交叉路口車輛的時變性要求。
模糊控制技術作為智能控制的重要分支之一,它的最大特點是針對各類具有非線性、強耦合、不確定性、時變的多變量復雜系統,在各個控制領域中得到廣泛的應用,并取得良好的控制效果。在城市道路中存在大量的平面交叉路口,交叉路口一般可以分成十字形、X形、T行、Y行和多路交叉形,本文以十字形交叉路口作為研究對象。
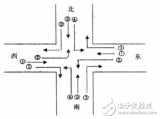
在平面交叉路口上某一支或者幾支交通流所獲得的通行權稱為信號權,簡稱相位。一個周期內有幾個信號相位,則稱該信號系統為幾相位系統。本文以雙向6車道4相位系統為例。第1相位東兩方向交通流直行,第2相位東西方向交通流左轉,第3相位南北方向交通流直行,第4相位南北方向交通流左轉,所有右轉方向交通流不予控制。其交通運行圖如圖1所示。

2 模糊控制器的設計
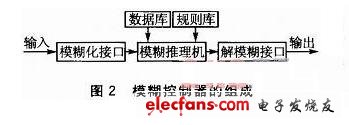
模糊控制器通常包括模糊化接口、數據庫、規則庫、模糊推理機和解模糊接口5部分,如圖2所示。
2.1 隸屬度函數
為了完成輸入的模糊化,必須知道輸入精確值對模糊化的隸屬度函數,如取7個,即PL(正大)、PM(正中)、PS(正小)、ZE(零)、NS(負小)、NM(負中)、NL(負大)。在精度要求比較高的情況下可以采用正態分布,一般情況下可取三角形或者梯形,本文采用三角形的隸屬度函數。
在紅燈期間,取線圈感應取為100 m,車身及車距平均距離取5 m,將測得的車輛排隊長度P看作模糊變量。其論域為:
P={1,3,5,7,9,11,13,15,17,19,21}
取7個語言值,其賦值表如表1所列。

當前相位車隊長度與下一相位的車隊長度之差Q作為綠燈延遲的修正值。其論域為:
Q={-12,-9,-6,3,0,3,6,9,12)
取7個語言值,其賦值表如表2所列。

一般情況下,為了避免車輛來不及通過,綠燈時間不低于20 s;為了避免車輛等待時間太長,綠燈時間不超過60s。綠燈的追加時間看作模糊量g。總的追加時間的論域為:
T={4,8,12,16,20,24,28,32,36}
取7個語言值,其賦值表如表3所列。

2.2 車輛檢測器
采用環形線圈式,金屬線圈埋在地下,構成LC振蕩回路。受車身鐵磁材料的影響,電感量發生變化,根據電感不同可知車輛通過時的脈沖,從而推算出車輛通過的頻率。
2.3 控制器的設計
本文采用二維模糊控制器,二維指的是模糊控制器的輸入變量有兩個,而控制器的輸出只有一個。這類模糊規則的一般形式為:
IF X1 IS Ai AND X2 IS Bi THEN Y IS Ci
由控制規則得到模糊控制規則表,如表4所列。

3 模糊控制的FPGA實現
3.1 Spartan3A/3AN介紹
FPGA具有性能好、規模大、可重復編程、開發投資小等優點,在現代電子產品中應用得越來越廣。使用Xilinx的Spartan3A/3AN FPGA時,ISE是必備的設計工具。它可以完成開發的全部流程,包括設計輸入、仿真、綜合、布局布線、生成BIT下載文件、配置和在線調試等。本文采用E-Elements ISE Development Kit開發套件和ISE10.1軟件設計工具,建立模糊控制交通燈系統工程,如圖3所示。

3.2 系統的整體結構及軟件設計
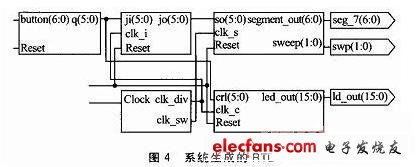
系統生成的RTL如圖4所示。該系統主要由數據采集模塊、模糊推理模塊、分頻模塊、計數器模塊、狀態機控的車流量和下一相位的車流量;模糊推理模塊對采集到的數據進行計算,并確定當前交叉口的通行情況(包括4個相位的通行與禁止、通行的準確時間);分頻模塊將系統提供的40 MHz的頻率進行分頻得到1 Hz;計數器將模糊推理模塊得到的具體數據實現減1計數,并通過7段數碼管顯示。
對于模糊決策部分,其中每一條模糊條件語句都決定一個模糊關系。
例如:if P=P1 and Q=Q2,then T=T2所決定的模糊關系可以按下式計算:
R2=(P1×Q2)T×T2 (1)
此處的T表示將矩陣按行排列成一列向量,通過39個模糊關系的“并”運算,可獲取表征總的模糊關系,即:
![]()
給定輸入,由R按合成推理規則可得模糊輸出:
Ri=(Pi×Qj)T×R (3)
根據所有的組合以及按式(2)和式(3)可求得綠燈延時,加上綠燈基本延時最終可確定當前相位的綠燈總時間,然后建立控制查詢表,編寫VHDL描述語言。
3.3 模糊控制交通燈硬件實現
BIT文件由FPGA綜合實現T具產生,用于配置FPGA,JTAG邊界掃描鏈的每一個FPGA需要一個BIT文件。使用電纜下載配置文件到PROM時,主要工作過程是啟動iMPACT,在文件模式中用PROM Formatter把BIT文件轉為MCS/EXO格式的PROM文件,然后在配置模式中初始化邊界掃描鏈,接著就可以下載配置文件了,如圖5所示。

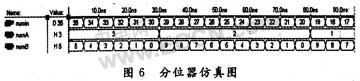
以上設計已經編程完畢并且完成驗證,開發板spartan3A/3AN已經可以工作。由7個按鍵模擬輸入,輸入數據不同,數碼管根據模糊控制判決得出不同的數據顯示,狀態控制器得出當前狀態,并用LED燈來直觀顯示,如圖6所示。
結語
本文提出一種智能交通燈模糊控制的方法,利用FPGA的優勢以及其軟硬件協同工作帶來的便利,將智能交通燈控制在FPGA上實現。由硬件實現可以看出,它能根據采集到的當前相位車流量和當前相位與下一相位車流量之差,由模糊控制器按一定的規則實時決定當前相位綠燈延時時間,從而達到最大程度的通行量。











 工商網監
工商網監
評論