 電子發(fā)燒友App
電子發(fā)燒友App


GPS 信號模擬源在GPS 接收機研發(fā)生產(chǎn)和測試中具有重要的作用。見諸文獻的最早的衛(wèi)星導(dǎo)航信號仿真系統(tǒng)是1977 年報道的Texas Instruments 公司開發(fā)的GPS 模擬器[1]。從那時開始, 伴隨著GPS 衛(wèi)星星座的建立、GPS 體制的更新、GLONASS 系統(tǒng)的出現(xiàn), 衛(wèi)星導(dǎo)航信號精密模擬源也從單通道發(fā)展到多通道, 模擬合成發(fā)展到數(shù)字合成, 從中頻數(shù)字合成發(fā)展到基帶數(shù)字合成, 由單一系統(tǒng)仿真發(fā)展到多系統(tǒng)混合仿真, 由專用向通用方向發(fā)展, 由系統(tǒng)仿真向片上(onchip)仿真發(fā)展[2]。
第一代衛(wèi)星導(dǎo)航信號模擬器以模擬技術(shù)為主,采用射頻合成的技術(shù)方案, 即把每顆星的信號獨立調(diào)制到射頻然后進行合成[3]。隨著數(shù)字技術(shù)的發(fā)展,以及對模擬器信號精度和通道一致性要求的提高,導(dǎo)航信號模擬器開始應(yīng)用數(shù)字技術(shù), 并在中頻進行模擬信號合成。目前國外市場上最新的GPS 仿真系統(tǒng)均不同程度地采用了大規(guī)模DSP/FPGA 技術(shù), 在數(shù)字域進行直接信號合成, 把多顆衛(wèi)星的數(shù)字合成信號用一個射頻通道輸出, 以提高其信號精度和通道間的一致性。英國、美國、瑞典、挪威、德國等,都已經(jīng)有比較成熟的產(chǎn)品[4-5]。其中, Spirent 公司、Aeroflex 公司等公司生產(chǎn)的GPS 模擬器最具代表性。
GPS 信號模擬器目前主要用于GPS 接收機的生產(chǎn)廠家和研究單位。對于大多數(shù)需求單位而言, 對于信號模擬的要求并不高, 需要一種能產(chǎn)生固定的GPS 射頻信號的設(shè)備, 在這個固定的模擬信號里,星座已知, 用戶軌跡已知, 不需要長時間連續(xù)運行。然而市場上的GPS 信號模擬器功能全面, 可設(shè)置衛(wèi)星的星座、電離層參數(shù)、用戶軌跡可設(shè)置。需要采用上位機+下位機結(jié)構(gòu), 結(jié)構(gòu)復(fù)雜, 導(dǎo)致GPS 信號模擬源價格昂貴, 不能為廠家接受。
文獻[6]提出了一種嵌入式的GPS 模擬信號源的結(jié)構(gòu), 采用ARM 作為控制單元, 原始電文保存在ARM 存儲器中, 采用FPGA 用于偽碼產(chǎn)生和擴頻處理, 采用AD9854 作為DDS 芯片。文獻[7]提出了一種十二通道GPS信號模擬器方案, 采用了PC機+PCI板卡技術(shù), 采用雙口RAM 作為PC 機和DSP 的數(shù)據(jù)緩沖區(qū), DSP 實現(xiàn)參數(shù)讀入, 產(chǎn)生C/A 碼并擴頻調(diào)制。碼延遲、數(shù)字載波調(diào)制及數(shù)字增益控制由FPGA控制。這些方法都采用了上位機+下位機的實現(xiàn)方式。
提出了一種簡易的GPS 信號模擬方法, 將GPS導(dǎo)航電文和觀測數(shù)據(jù)按一定的格式存儲為文件, 通過讀取文件產(chǎn)生GPS 信號。在單片F(xiàn)PGA 上實現(xiàn)了GPS 信號基帶處理的所有過程, 采用正交射頻調(diào)制方法直接產(chǎn)生L1 頻點信號。采用不同的文件實現(xiàn)不同的測試場景, 利用該方法構(gòu)建的GPS 信號模擬源成本低、體積小, 可滿足大部分GPS 接收機的測試需求。
GPS 信號模擬源的系統(tǒng)設(shè)計指標(biāo)
根據(jù)廠家的需求, 確定GPS 信號模擬源的技術(shù)指標(biāo)如下:
仿真衛(wèi)星總星數(shù): 12 顆
連續(xù)輸出模擬信號時間: 2 h
偽距控制精度: 0.027 m
偽距變化率精度: 優(yōu)于0.05 m/s
用戶動態(tài)范圍: 速度: 0~5 000 m/s; 速度分辨率: 10 mm/s
通道間一致性: <1 m(碼) <0.005 m(載波)
載波與偽碼相干性: <1 度(包含隨機抖動和不確定性)
I、Q 相位正交性: <1°
GPS 信號模擬源的總體方案
由于只需產(chǎn)生固定場景的GPS 信號, 因此GPS導(dǎo)航電文是固定的, 采用離線產(chǎn)生即可。此外還需要觀測數(shù)據(jù)文件, 觀測數(shù)據(jù)主要描述了偽距的變化情況, 模擬器根據(jù)觀測數(shù)據(jù)文件對導(dǎo)航電文進行處理。為了描述偽距的連續(xù)變化, 觀測數(shù)據(jù)中還包含了偽距的一階、二階變化率, 這樣通過插值就可獲得高密度的偽距變化值。
真實的 GPS 衛(wèi)星射頻信號產(chǎn)生流程如下: 偽碼發(fā)生器產(chǎn)生1.023 MHz 的C/A偽隨機碼, GPS 的導(dǎo)航電文速率為50 bps, 導(dǎo)航電文首先與該C/A 碼疊加,產(chǎn)生了基帶信號; 在GPS 衛(wèi)星上, 基帶信號被調(diào)制到L1 載頻, 然后通過天線釋放。接收機接收到的射頻信號與衛(wèi)星發(fā)送的射頻信號對比, 其接收到的信號是經(jīng)過傳輸延遲的信號; 此外由于衛(wèi)星的運動,衛(wèi)星與接收機之間具有相對運動, 由于多普勒效應(yīng),接收機接收到的射頻信號頻率產(chǎn)生了變化。
射頻信號模擬過程中關(guān)鍵的環(huán)節(jié)就是模擬信號的傳輸延遲和多普勒效應(yīng)。其傳輸延遲用偽距來表示, 考慮到偽距的連續(xù)性, 觀測數(shù)據(jù)中包含偽距的速度、加速度, 利用差補的方法可獲得高精度的連續(xù)的偽距變化。獲得采用延遲濾波器的方法實現(xiàn)基帶信號的延遲, 采用多階數(shù)字濾波器的方法, 利用高性能數(shù)字信號處理芯片實現(xiàn), 可獲得精度為ns 級的延遲精度; 同樣采用數(shù)字信號處理的方法對基帶信號實現(xiàn)多普勒處理, 可獲得1Hz 的頻率分辨率。
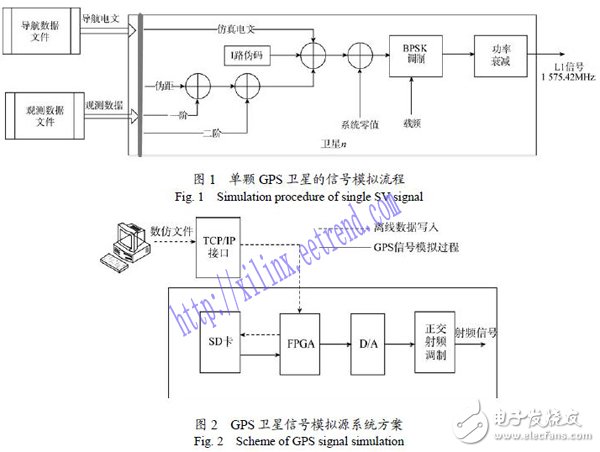
單顆 GPS 衛(wèi)星信號仿真流程如圖3 所示, 數(shù)學(xué)仿真產(chǎn)生的觀測數(shù)據(jù)包括偽距和一階、二階量。數(shù)學(xué)仿真產(chǎn)生的導(dǎo)航電文以50 bps 的速率被I 路偽碼調(diào)制。調(diào)制后的信號則為數(shù)字基帶信號, 該信號經(jīng)過多階延遲濾波器進行延遲處理, 模擬GPS 信號在空間的傳遞時間; 經(jīng)過基帶處理的信號通過正交調(diào)制變?yōu)長1 載頻的信號。
真實的多顆 GPS 衛(wèi)星信號在空間合成, 而模擬的GPS 衛(wèi)星信號在數(shù)字域?qū)崿F(xiàn)疊加合成。采用地址發(fā)生器產(chǎn)生12 顆衛(wèi)星的特征碼, 分別與對應(yīng)的導(dǎo)航電文進行疊加, 合成的基帶信號通過正交射頻調(diào)制,調(diào)制為L1 頻點1.575 GHz 的射頻信號。
而 GPS 衛(wèi)星信號模擬源采用圖2 所示方案。采用SD 卡存儲導(dǎo)航電文和觀測數(shù)據(jù)文件。在系統(tǒng)工作時, FPGA 讀取SD 卡的數(shù)據(jù), 按圖1 所示的流程產(chǎn)生衛(wèi)星的基帶信號, 多顆星的基帶信號經(jīng)數(shù)字合成后,送至DA 變?yōu)槟M信號, 再進行正交射頻調(diào)制獲得L1 頻點的射頻信號。
?
?
當(dāng)系統(tǒng)需要更新數(shù)仿文件時, 則通過TCP/IP 接口對SD 卡進行讀寫操作, 實現(xiàn)SD 卡中的文件更新。
數(shù)據(jù)文件格式
GPS 信號模擬的目的是使GPS 接收機通過接收模擬的信號正常工作, 實現(xiàn)定位解算。而GPS 信號是由多顆不斷運行的GPS 衛(wèi)星實時發(fā)射產(chǎn)生的。為了實現(xiàn)GPS 信號模擬, 首先需要設(shè)定用戶軌跡、建立GPS 衛(wèi)星軌道模型和信號傳輸模型, 運算量較大。因此采用離線運算的方法, 先在高性能計算機上進行仿真計算, 再將計算得到文件保存下來。GPS 模擬器通過讀取該文件, 實現(xiàn)GPS 信號的仿真。這種方法的好處在于為模擬器節(jié)省了大量的資源, 有利于降低成本和體積。
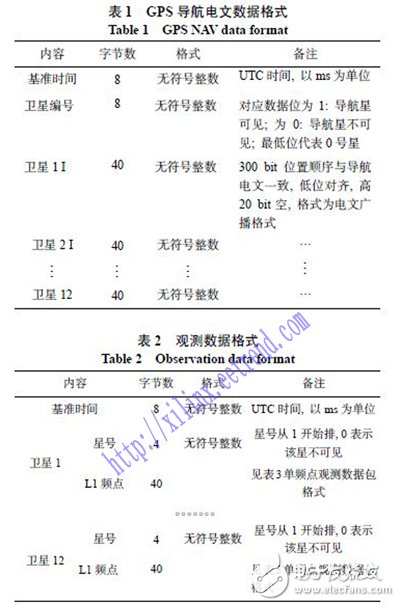
為了讓接收機實現(xiàn)定位, 必須要提供4 顆以上的GPS 衛(wèi)星信號; 仿真了12 顆GPS 衛(wèi)星的數(shù)據(jù), 仿真數(shù)據(jù)主要包括導(dǎo)航電文和觀測數(shù)據(jù)。導(dǎo)航電文格式為300 bit, 占40 字節(jié), 剩余20 bit 空; 觀測數(shù)據(jù)則根據(jù)設(shè)定的位置和衛(wèi)星星歷產(chǎn)生, 模擬固定位置接收機產(chǎn)生的偽距變換, 20 ms 更新一次, 為了實現(xiàn)偽距的連續(xù)變化, 觀測數(shù)據(jù)中還包含偽距速度和加速度, 便于信號產(chǎn)生過程中的插值。
GPS 導(dǎo)航電文速率為50 bps, 300 bit 為一子幀, 一子幀為6 s。一幀包含5 子幀, 共1 500 bit, 歷時30 s。一超幀則包含25 幀, 37.5 k, 歷時12.5 min。由于GPS 電文每兩小時更新一次, 則2 h 需存儲的導(dǎo)航電文約為 375 k; 12 顆星的導(dǎo)航電文為4.5 M。
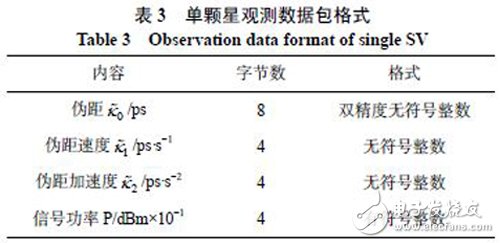
觀測數(shù)據(jù)則為20 ms 更新一次, 單顆星的觀測數(shù)據(jù)為40 個字節(jié), 一個觀測數(shù)據(jù)包有12 顆星, 共4 288 bit; 則2 h 的數(shù)據(jù)量為4 288×50×7 200=1 543680 000 bit, 約1.5 G。因此, 采用2 G 的SD 卡可完成上述數(shù)據(jù)容量的要求。
硬件設(shè)計
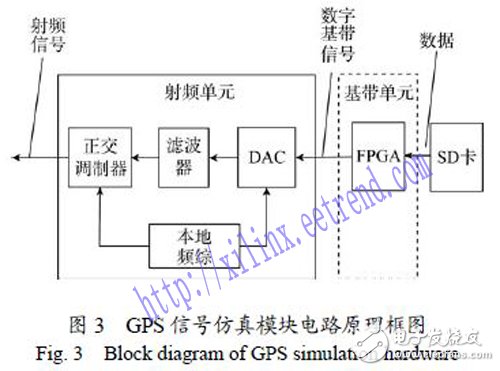
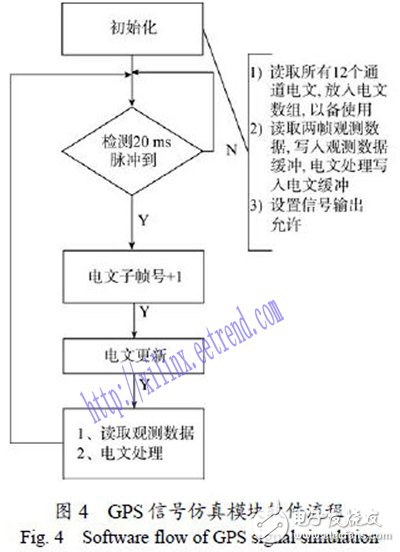
GPS 信號模擬源的設(shè)計采用高速基帶數(shù)字合成技術(shù)和正交中頻、射頻調(diào)制技術(shù)。多顆衛(wèi)星信號以數(shù)字形式在高性能軟件無線電處理平臺上計算并合成, 有效提高系統(tǒng)通道間的一致性, 消除了衛(wèi)星通道間的誤差, 也消除了內(nèi)部時間誤差, 確保了高精度。該方案與射頻合成方案相比增加了軟件無線電數(shù)字部分設(shè)計的難度, 使得偽距控制精度、多普勒變化和幅度等均在數(shù)字部分計算, 簡化了射頻設(shè)計,避免了由射頻群時延不一致產(chǎn)生的通道間誤差和衛(wèi)星間的鐘差, 且數(shù)值計算、鐘差可控, 有效保證了系統(tǒng)的設(shè)計指標(biāo)。信號模擬源方案原理如圖4 所示。GPS信號模擬源采用基帶加射頻的單元模塊化結(jié)構(gòu)設(shè)計。
?
?
GPS 信號模擬算法對數(shù)據(jù)處理率有較高的要求,然而通過分析延時算法, 這樣龐大的計算量實際上只是簡單的乘累加(MAC) 的流水操作, 其算法結(jié)構(gòu)中并無復(fù)雜的數(shù)學(xué)運算(如正余弦、指數(shù)、對數(shù)等) ,可以說其運算結(jié)構(gòu)是相對比較簡單的, 所以考慮采用FPGA 芯片。而目前FPGA 的功能也日益增強, 內(nèi)嵌于FPGA 的硬核與基本邏輯構(gòu)建的軟核也不斷增強了FPGA 作為通用信號處理芯片的能力。通過綜合考慮, 最終選擇了用XILINX 公司的XC4VSX35作為主處理芯片。該芯片是XILINX 公司2005 推出的一款專門為數(shù)字信號處理而設(shè)計的高端FPGA, 其可編程數(shù)字信號處理模塊XtremeDSP48 在?12 的速度等級上最高性能為500 MHz。
基帶單元設(shè)計采用1 片Xilinx 高性能FPGAXC4VSX35 來完成。XC4VSX35 主要完成以下任務(wù):1) 從SD 卡讀入導(dǎo)航電文和觀測數(shù)據(jù); 2) 多星數(shù)據(jù)的分配; 3) 多星信號的精密延遲和動態(tài)特性控制;4) 多星信號的數(shù)字合成。設(shè)計上可完成12 顆星I 路的導(dǎo)航信號產(chǎn)生。
軟件設(shè)計
系統(tǒng)上電后首先讀取所有12 通道的電文數(shù)據(jù),由于GPS電文為2 小時更新一次。一個超幀25 幀, 每幀300 bit, 合計7 500 bit。12 顆星的導(dǎo)航電文總數(shù)據(jù)量為90 k。系統(tǒng)讀取電文數(shù)據(jù)后, 放入電文數(shù)組, 寫入緩沖; 讀取兩幀觀測數(shù)據(jù), 寫入緩沖; 由于觀測數(shù)據(jù)更新頻率為20 ms 一次, 因此每20 ms 讀1 幀觀測數(shù)據(jù), 輸出信號。信號處理流程如圖4 所示。
?
實驗與分析
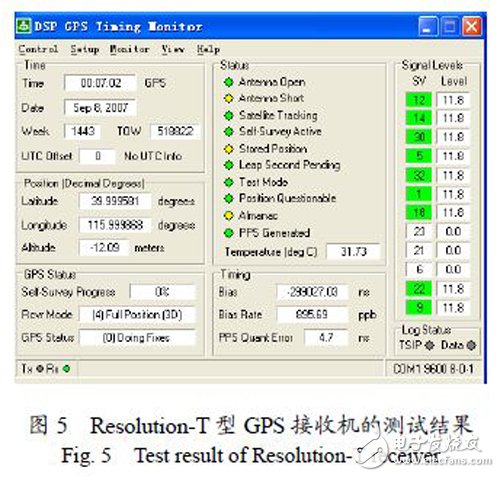
采用Trimble 公司生產(chǎn)的Resolution-T 型GPS接收機對設(shè)計的GPS 信號模擬源進行測試。將Resolution-T 型GPS 接收機串口輸出與電腦相連, 通過DSPMon_V1-46 軟件, 觀察P-T 星卡解調(diào)出的射頻模擬信號時間及位置是否正確, 誤差大小是否符合性能要求等, 模擬輸出的衛(wèi)星數(shù)是否能達到四顆可以上, 結(jié)果如圖5 所示, 可見達到了設(shè)計要求。
?
結(jié)論
本文介紹了一種基于數(shù)據(jù)文件讀取的GPS 信號模擬器, 采用離線計算獲取數(shù)據(jù)文件, 避免了實時計算需要的大量硬件資源, 從而降低了GPS 信號模擬源的成本。通過更換文件可以改變信號模擬的場景設(shè)置, 具有一定的靈活性。這種方法能滿足部分GPS接收機生產(chǎn)廠家的測試需求。









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論