

















CAN和能源效率
由于CAN標準的演變和創(chuàng)新,可以實現(xiàn)系統(tǒng)級的電流和功耗管理。在汽車中未使用時通過禁用和激活低功耗模式,可以降低和優(yōu)化整個系統(tǒng)的電流消耗。當然在必要情況下,ECU應當恢復運行。
如圖所示,可以分析2個ECU、汽車泊車輔助和電子泊車制動的運行。當汽車的運行速度超過一定數值時(比如數千公里/小時),這些ECU就不再需要工作了。此時,這些ECU可以自行設置為低功耗模式,它們通過CAN網絡和CAN報文接收車輛速度。當速度大于預先設定的閾值,這些ECU可以主動設置為低運行模式,禁用或關閉線路板組件(例如MCU或負載驅動器)的電源。只需最少的IC保持激活狀態(tài),用于監(jiān)控CAN總線流量并檢測特定的CAN報文或CAN的部分報文,它可以指示何時給暫停運行的IC重新上電,以便指示這些ECU它們應該恢復運行。
這有助于汽車整體功耗的降低和優(yōu)化。
可以通過在與CAN總線相連的CAN收發(fā)器內部執(zhí)行CAN報文檢測,實現(xiàn)這種操作。這被稱為CAN局部網絡或CAN選擇性喚醒。
挑戰(zhàn)在于,通過極低功耗(目標低于500 uA)能夠解碼輸入的CAN幀,在CAN物理層內以最低成本獲得完整的局部網絡,且不使用精確的振蕩器組件(例如晶體振蕩器或共振器)。需要提醒的是,MCU內部的CAN控制器采用極為準確的時鐘,其測量的精度和偏差均可達到ppm級。顯然,這樣的時鐘精度在硅片中還不能實現(xiàn)。
然而,CAN報文和解碼只需要“百分比”量程的時鐘。因此,憑借創(chuàng)新的技術和解決方案,這些方案可在混合信號硅工藝中完成,CAN報文的集成可以實現(xiàn),從而用于CAN收發(fā)器功能。
這些解決方案采用高精度模擬功能(例如低功耗精確振蕩器、低電流差分接收器、低功耗基準電壓和偏置電路),并且與數字CAN報文解碼器相互結合,以便實現(xiàn)輸入CAN報文的解碼。然后,輸入CAN報文與預先選擇的報文進行比較,收發(fā)器喚醒,并且驅動ECU恢復運行。
此外還面臨著多種EMC挑戰(zhàn),盡管汽車中存在射頻干擾和電氣瞬變,CAN幀仍然需要正確解碼。只有電路在極低電流下運行(大約十分之一微安),才能實現(xiàn)整體500微安的功耗目標,這變成了一項真正的實施挑戰(zhàn)。
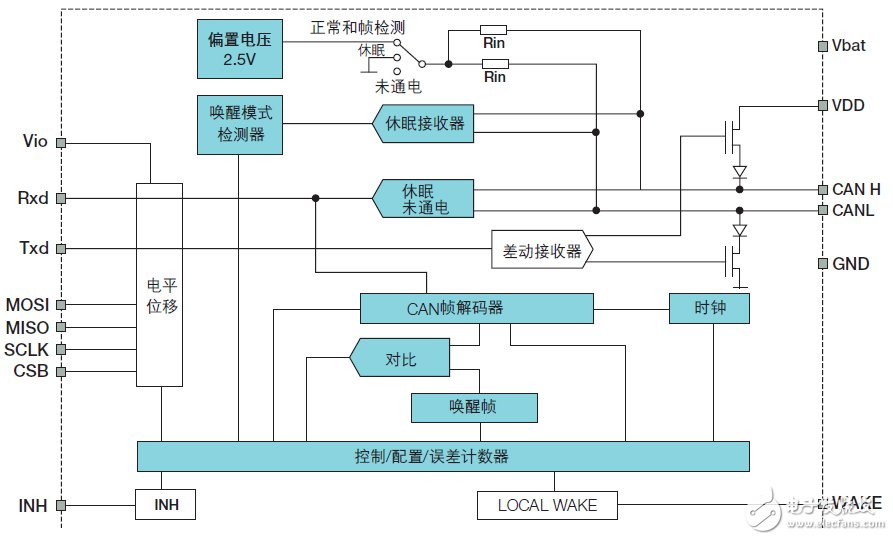
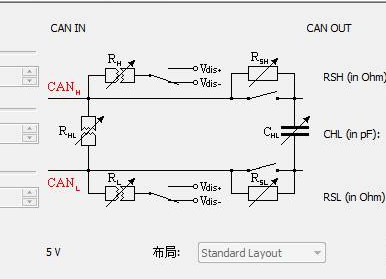
下圖所示為CAN局部網絡功能的典型結構圖,采用市場標準引腳配置。灰色方框是CAN PN運行期間工作的部分,總計所需電流低于500微安。
執(zhí)行局部網絡功能的CAN收發(fā)器結構圖
下表歸納了日后CAN收發(fā)器升級版的CAN FD的主要技術限制和影響。
技術匯總
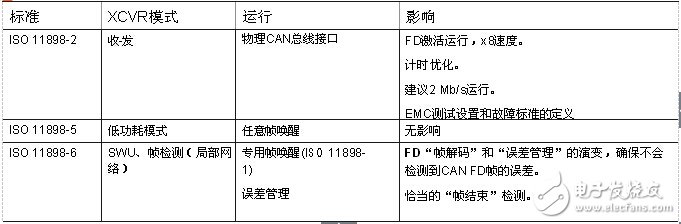
在正常運行時,如ISO11898-2中所述,主要影響在于滿足EMC技術規(guī)范的前提下, 滿足CAN FD時不會降低相應的要求。
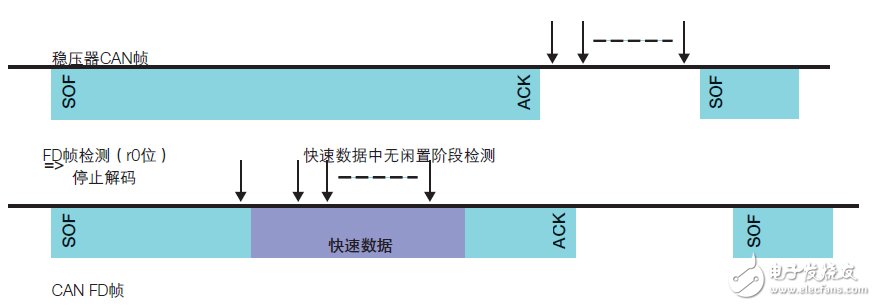
在局部網絡運行中,如ISO11898-6所述,CAN FD不可干擾CAN輸入報文檢測,CAN PN收發(fā)器應當是“被動的可變速率”的。通過恰當檢測CAN幀間間隔且適當區(qū)分快速數據段,可以達到上一目標。
常規(guī)數據幀和可變速率幀的對比
創(chuàng)新的反向集成
抗輻射和抗干擾、ESD穩(wěn)健性、低功耗和CAN高速通信的更高波特率之間獲得理想的權衡取舍,需要通過對模擬IC的每一種物理現(xiàn)象加以深入分析才能實現(xiàn),正確的數據交互也同樣如此。
市場向更高波特率的演變需求對期間的抗輻射和抗干擾水平產生了影響。這些要求需要在前期定義時就加以考慮,以便在提高性能的同時,不會降低可靠性。
飛思卡爾MC33901和MC34901 CAN FD收發(fā)器芯片擁有的高可靠性、極低的待機功耗,使得它在眾多產品中獨樹一幟。飛思卡爾CAN物理層收發(fā)器擁有四個不同的型號,可以解決汽車(MC33901)和工業(yè)(MC34901)市場的各種挑戰(zhàn),提供配置或不配置總線喚醒選項(W版或S版)。
關于CAN PN,物理層需要模擬收發(fā)器的結構具有很低的功耗,這樣可以抵御外部潛在的噪音干擾。再次聲明,噪聲模型與設計架構之間的一致性可以支持物理層擁有同樣水平的EMC性能前提下,降低物理層收發(fā)器的功耗。
本文選自電子發(fā)燒友網7月《汽車電子特刊》Change The World欄目,轉載請注明出處!





 工商網監(jiān)
工商網監(jiān)
用戶評論(0)