汽車(chē)電液助力轉(zhuǎn)向系統(tǒng)ECU的設(shè)計(jì)與開(kāi)發(fā)
系統(tǒng)介紹
電動(dòng)液壓助力轉(zhuǎn)向系統(tǒng)(EHPS)主要由以下幾部分組成,它們是助力轉(zhuǎn)向控制單元(ECU)、助力轉(zhuǎn)向傳感器、帶電動(dòng)泵的齒輪泵、儲(chǔ)油罐、轉(zhuǎn)向傳動(dòng)裝置、CAN 總線系統(tǒng)。我們的主要工作是助力轉(zhuǎn)向控制單元(ECU)的軟硬件研究與開(kāi)發(fā)。助力轉(zhuǎn)向控制單元根據(jù)助力轉(zhuǎn)向傳感器傳來(lái)的信號(hào)為主,兼或考慮CAN 總線上的車(chē)輛速度來(lái)進(jìn)行電動(dòng)泵的轉(zhuǎn)速控制,進(jìn)而控制齒輪泵的泵油量來(lái)達(dá)到控制助力轉(zhuǎn)向傳動(dòng)裝置的目的。這樣我們就可以根據(jù)車(chē)輛方向盤(pán)的轉(zhuǎn)向角速度和車(chē)輛當(dāng)前的行駛速度來(lái)確定我們當(dāng)前所需要的轉(zhuǎn)向助力的大小。
1. ECU 設(shè)計(jì)概要
1.1 ECU 的CPU 的選擇
控制器(ECU)的設(shè)計(jì)關(guān)鍵是選擇一種適用于特定控制目標(biāo)的單片機(jī),對(duì)車(chē)輛電動(dòng)液壓助力轉(zhuǎn)向系統(tǒng)來(lái)說(shuō),它對(duì)單片機(jī)要求有如下幾個(gè)特點(diǎn):
① 抗環(huán)境干擾,滿足汽車(chē)級(jí)芯片溫度范圍的要求,即-40~+125℃。
② 有較多的I/O 口,以實(shí)現(xiàn)多種控制功能;快速的計(jì)算速度,以滿足實(shí)時(shí)控制要求。
③ 采用標(biāo)準(zhǔn)的通訊接口,以便于診斷功能的實(shí)現(xiàn),同時(shí)具有與車(chē)輛上其它CPU 進(jìn)行通訊的能力。
④ 有較好的性能價(jià)格比,便于批量裝車(chē),使之成為一種普及型產(chǎn)品。
基于上述特點(diǎn)采用16 位單片機(jī)對(duì)電動(dòng)液壓助力轉(zhuǎn)向系統(tǒng)是一種適中的選擇。并且國(guó)外電動(dòng)液壓助力轉(zhuǎn)向系統(tǒng)產(chǎn)品目前絕大多數(shù)都選用這一檔次的單片機(jī)。Infineon XC164CM 正是這一適中產(chǎn)品,它是Infineon 公司為車(chē)輛控制系統(tǒng)設(shè)計(jì)的16 位單片機(jī)。
1.2 ECU 模塊設(shè)計(jì)
見(jiàn)圖1,所設(shè)計(jì)的基于Infineon XC164CM 單片機(jī),它包括輸入、輸出、故障診斷、車(chē)輛信息數(shù)據(jù)傳輸四個(gè)模塊。
①輸入模塊
輸入采用XC164CM 的輸入捕捉功能CAPCOM 單元,每個(gè)輸入通道對(duì)應(yīng)一個(gè)獨(dú)立的CAPCOM 通道。CAPCOM 通道可以在每個(gè)事件接收后發(fā)出中斷,它有一個(gè)捕捉寄存器CCx,即可以保持1 個(gè)事件。由于中斷地址是獨(dú)立的,這樣進(jìn)入中斷服務(wù)程序就不用再識(shí)別是哪個(gè)中斷源,提高了中斷服務(wù)處理的效率。在本系統(tǒng)中亦采用CC16 和CC17 作為2 個(gè)霍爾器件脈沖的輸入信號(hào)撲捉通道,采用CC23做為方向盤(pán)轉(zhuǎn)角脈沖的輸入信號(hào)撲捉通道。采用CAPCOM 通道使采集信號(hào)的質(zhì)量大大提高,CPU 占用時(shí)間少,CAPCOM 的捕捉事件的分辯率在20MHz 主頻下為400 ns。
②輸出模塊
XC164CM 有47 個(gè)I/O 端口,在本系統(tǒng)中采用P1 口作為控制輸出口。每個(gè)I/O 口都用獨(dú)立的控制器控制輸入/輸出。
③診斷模塊
EHPS 是一種可靠性要求很高的系統(tǒng),要求內(nèi)部程序?qū)ο到y(tǒng)要隨時(shí)進(jìn)行監(jiān)控,一旦發(fā)生故障,能及時(shí)記錄下來(lái),并把其存貯起來(lái)。本系統(tǒng)采用I2C 總線的E2 PROM 作為故障代碼存貯器,用XC164CM的同步串行功能實(shí)現(xiàn)I2C 總線與E2PROM 通訊,XC164CM 作為主機(jī),E2PROM 作為從機(jī)。通過(guò)XC164CM的CAN1 口實(shí)現(xiàn)外部診斷通訊,與PC 機(jī)端是通過(guò)USB 數(shù)據(jù)采集卡連接通訊。
④車(chē)輛信息數(shù)據(jù)傳輸
單片機(jī)XC164CM 帶有兩個(gè)CAN 總線控制器,CAN1 和CAN2。內(nèi)部有2K 字節(jié)的CAN 寄存器空間來(lái)實(shí)現(xiàn)CAN 通訊,它有32 個(gè)信息體,每個(gè)信息體有8 個(gè)字節(jié)的數(shù)據(jù)可以傳送。EHPS 系統(tǒng)所需的車(chē)速和發(fā)動(dòng)機(jī)轉(zhuǎn)速就是通過(guò)2. ECU 軟件設(shè)計(jì)
該程序結(jié)構(gòu)采用C 語(yǔ)言中流行的多模塊結(jié)構(gòu),這種結(jié)構(gòu)比起以往的單模塊結(jié)構(gòu)來(lái)說(shuō)有程序結(jié)構(gòu)清晰,便于程序移植和程序維護(hù)等特點(diǎn)。
2.1 EHPS ECU 的主程序
EHPS 主循環(huán)是一個(gè)定時(shí)循環(huán)調(diào)用程序,程序框圖見(jiàn)圖2。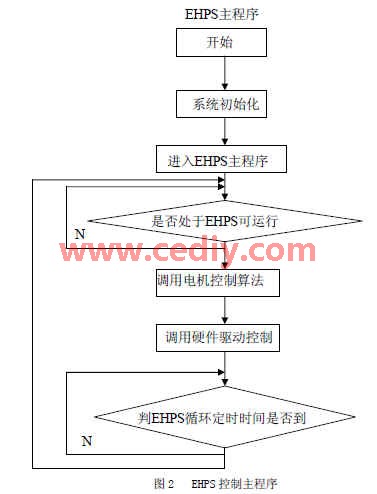
它主要是調(diào)用各個(gè)子程序。定時(shí)時(shí)間要根據(jù)算法的復(fù)雜性,當(dāng)算法比較復(fù)雜、費(fèi)時(shí)比較長(zhǎng)時(shí),則每個(gè)循環(huán)的時(shí)間可以定義的比較長(zhǎng)。如果CPU 功能比較強(qiáng),而且算法比較簡(jiǎn)單,可以采用比較短的循環(huán)時(shí)間。比如5ms 甚至更小的時(shí)間。一些耗時(shí)比較長(zhǎng)的程序,例如診斷程序可以放在EHPS主循環(huán)外邊調(diào)用。每次程序開(kāi)始執(zhí)行時(shí)要調(diào)用初始化程序,首先對(duì)硬件外設(shè)進(jìn)行初始化,如串口、定時(shí)器等。這些初始化每次上電只定義一次,并且要開(kāi)放中斷,然后要進(jìn)行軟件初始化,設(shè)置EHPS控制的門(mén)限。這些門(mén)限有些在控制過(guò)程中變化,有些則是不變的常數(shù)。如果是不變的常數(shù)則可以采用C 語(yǔ)言中的宏定義的方法進(jìn)行定義。調(diào)用診斷程序是對(duì)系統(tǒng)進(jìn)行一次全面的診斷。這個(gè)程序耗時(shí)比較長(zhǎng),所以只在EHPS 主循環(huán)之外。EHPS 系統(tǒng)完成準(zhǔn)備工作后就進(jìn)入EHPS 循環(huán)。EHPS 循環(huán)
一般可以定義為4~50ms 之間。在這個(gè)時(shí)間之間調(diào)用各種算法,要保證每個(gè)程序運(yùn)行時(shí)間加起來(lái)小于EHPS 循環(huán)時(shí)間,這樣才能保證EHPS 的節(jié)奏。如果程序執(zhí)行時(shí)間大于EHPS 循環(huán)時(shí)間,則就會(huì)出現(xiàn)程序工作節(jié)拍性不強(qiáng),造成系統(tǒng)運(yùn)行的不穩(wěn)定。EHPS 循環(huán)時(shí)間是可調(diào)整的,就是要根據(jù)程序的執(zhí)行時(shí)間來(lái)調(diào)整。
2.2 EHPS ECU 的中斷程序
EHPS 主循環(huán)的運(yùn)行不時(shí)被中斷系統(tǒng)所打斷,一旦有中斷發(fā)生,CPU 要響應(yīng)中斷并退出主循環(huán)。中斷系統(tǒng)的服務(wù)程序主要處理突發(fā)和隨機(jī)事件。如果不用中斷就會(huì)占用主程序許多查詢時(shí)間,所以中斷系統(tǒng)實(shí)際是一種并行的多任務(wù)程序。
在EHPS 軟件中主要使用了下面幾種中斷類型:
1)方向盤(pán)轉(zhuǎn)角中斷:它使用輸入捕捉中斷將方向盤(pán)轉(zhuǎn)角脈沖信號(hào)記錄到寄存器,用于計(jì)算目標(biāo)轉(zhuǎn)速。
2)電機(jī)轉(zhuǎn)速采集中斷:它使用輸入捕捉中斷可以隨時(shí)將輸入轉(zhuǎn)速的脈沖信號(hào)記錄到寄存器。
3)串行通訊中斷:串行通訊主要用于診斷系統(tǒng),使用接收中斷,當(dāng)接收到上位機(jī)信號(hào)后就可以中斷主循環(huán)而進(jìn)入診斷程序。
4)定時(shí)器中斷:進(jìn)行控制系統(tǒng)的延時(shí)處理。
3. ECU 硬件電路系統(tǒng)設(shè)計(jì)
電子控制單元根據(jù)轉(zhuǎn)向速率和車(chē)速信號(hào)確定并控制電動(dòng)機(jī)的轉(zhuǎn)速和驅(qū)動(dòng)電流大小。使其在每一種車(chē)速下都可以得到最優(yōu)化的轉(zhuǎn)向助力扭矩。為了保護(hù)功率驅(qū)動(dòng)電路,需要對(duì)電機(jī)電流進(jìn)行采樣,為了降低采集噪聲,對(duì)系統(tǒng)電流輸入采用一級(jí)采樣保持電路,差分輸入端均經(jīng)過(guò)采樣保持器,利用P9 口的CC20、CC21 對(duì)采樣信號(hào)進(jìn)行電壓采樣。電機(jī)電流差分放大電路原理見(jiàn)圖3,為了提高系統(tǒng)抗干擾能力,在輸入端加有5mV 偏置電壓。為了控制電動(dòng)機(jī)的電流換相時(shí)刻,采用兩個(gè)霍爾轉(zhuǎn)速傳感器,對(duì)電機(jī)的換相進(jìn)行精確控制。霍爾轉(zhuǎn)速傳感器可以采TLE4905。為了控制電動(dòng)機(jī)的轉(zhuǎn)速,采用PWM 斬波控制電機(jī)電壓。利用XC164CM 的P1 口的P1L0~P1L3 控制電動(dòng)機(jī)的相位,利用P1 口的CC24、CC25 對(duì)電壓斬波,通過(guò)74LS366 進(jìn)行波形疊加后送給功率MOSFET。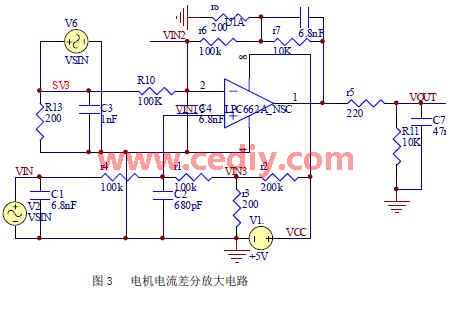
4. 試驗(yàn)結(jié)果對(duì)比
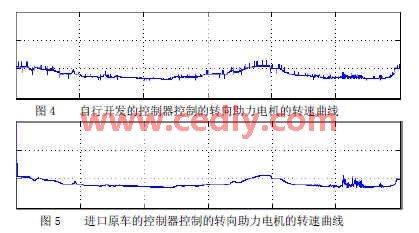
我們采用MATLAB/Simulink 控制開(kāi)發(fā)與測(cè)試平臺(tái)對(duì)我們的EHPS 系統(tǒng)進(jìn)行了仿真測(cè)試,圖4,圖5 為自行研制的ECU 與進(jìn)口原車(chē)上的ECU 控制效果的對(duì)比,從圖中曲線可以看出,兩種控制器的控制效果是相吻合的。同時(shí)我們進(jìn)行了由不同駕駛員進(jìn)行駕車(chē)體驗(yàn),在事先不告知何種控制器的情況下,駕駛員已分辨不出來(lái)是原車(chē)上的ECU 還是自行開(kāi)發(fā)ECU 在起作用。
結(jié)語(yǔ)
在將近兩年的研究過(guò)程中,我們主要采用了在實(shí)車(chē)上進(jìn)行控制程序的在線調(diào)試,并與國(guó)外同類產(chǎn)品進(jìn)行反復(fù)性能對(duì)比。這樣保證了產(chǎn)品在實(shí)車(chē)應(yīng)用可行性。依據(jù)國(guó)外同類產(chǎn)品電機(jī)控制曲線,我們EHPS ECU 從性能上已基本達(dá)到國(guó)外同類產(chǎn)品水平。但是可靠性要隨著產(chǎn)品的不斷裝車(chē)要進(jìn)一步進(jìn)行驗(yàn)證。
非常好我支持^.^
(0) 0%
不好我反對(duì)
(0) 0%
相關(guān)閱讀:
- [電子常識(shí)] SecureIT Mobile企業(yè)版技術(shù)白皮書(shū) 2011-03-01
- [RF/無(wú)線] 安全無(wú)線通信解決方案:Secure IT Mobile 2010-11-11
- [汽車(chē)電子] 汽車(chē)發(fā)動(dòng)機(jī)ECU開(kāi)發(fā)流程 2010-07-22
- [新品快訊] MAX36051 Ultra-low-power secur 2010-07-07
- [控制技術(shù)] 汽油/CNG兩用燃料發(fā)動(dòng)機(jī)ECU在環(huán)仿真 2010-05-13
- [新品快訊] 精益科技將于SecuTech2010展出最新車(chē)用監(jiān)控裝置 2010-03-25
- [新品快訊] ARM推出節(jié)能型SecurCore SC000處理器 2010-03-19
- [網(wǎng)絡(luò)/協(xié)議] Secunia研發(fā)多功能升級(jí)補(bǔ)丁 將使系統(tǒng)更安全 2010-03-08
( 發(fā)表人:發(fā)燒友 )