 電子發燒友App
電子發燒友App


1 引言
在美國制造和銷售的所有的小汽車和輕型卡車從1996年1月1號起都必須裝備有車載自動診斷系統(OBD-II)。然而OBD-II主要用于排放系統的診斷,車輛的其他各個子系統能被OBD-II診斷的比較少。雖然這些診斷碼對診斷部分 故障是很有用的,但是這些信息還不足以有效的區分特定的故障部位。通過接入OBD-II接口的掃描工具能獲得故障碼,但是各個生產廠商提供的手持式掃描工 具與OBD-II通信的標準并不統一,歐洲和大部分亞洲國家使用ISO9141標準與OBD-II通信,而通用汽車的小汽車和輕型卡車則使用sae j1850 vpwm標準,福特公司采用sae j1850pwm標準。
這樣就導致傳統的汽車故障診斷有如下缺點:在不同汽車制造商之 間診斷技術沒有形成標準,無疑這會導致車輛的診斷成本大幅增加;故障診斷需要駕駛車輛到特定的修理地點,這導致駕駛者的不方便,也不可能經常的進行定期的 診斷和維護;一次全面地診斷需要特定的設備和熟練的技術員,這會使診斷的成本很高;故障碼提供的信息通常是不足夠精確來指出故障的來源;隨著汽車電子控制 系統變得越來越復雜,診斷各部分的故障也越來越困難。
汽車上各種電子控制單元的數目不斷增加,連接導線顯著增加,因而提高控制單元間通 訊可靠性和降低導線成本已成為迫切需要解決的問題。為此以研發和生產汽車電子產品著稱的德國Bosch公司開發了CAN總線協議,并使其成為國際標準 (ISO11898)。CAN協議的一個最大特點是廢除了傳統的站地址編碼,而代之以對通信數據塊編碼,采用這種方法可使網絡內節點個數在理論上不受限 制,還可使不同的節點同時收到相同的數據。
隨著遠程通訊、總線技術、基于模型的診斷、電子和嵌入式技術的進步,車輛的故障診斷和監控技術得到很大發展,使得能夠在車輛行駛的過程中實現遠程診斷和監控。這些技術的具備和車主們越來越大的興趣使得汽車界也投入了越來越多的精力來實現遠程診斷和監控。
2 系統結構設計
2.1 系統原理
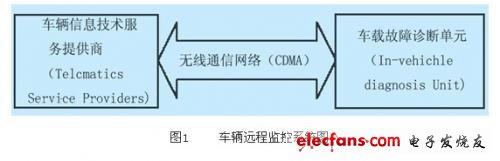
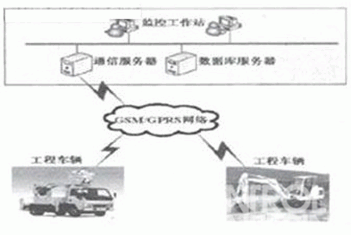
車輛的遠程故障診斷是一個多學科的復雜系統,包含車載故障診斷單元,遠程車輛信息技術服務中心和無線通訊網絡系統。近來出現了許多相關的專利和文章。
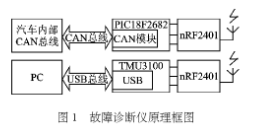
圖1是車輛的遠程故障診斷系統的工作原理圖,車載故障診斷單元和服務中心通過無線通訊來實現遠程診斷:遠程服務中心通過無線網絡獲得車載故障診斷單元發 送的狀態信息,然后通過分析車輛的運行參數和故障碼,遠程信息技術服務中心通知車主故障的嚴重程度,并提供必要的支持服務,并安排必要的保養或者建議修理 來解決出現的故障。
2.2 功能設計
(1) 車輛能智能化的向遠程服務中心提供故障碼,關鍵傳感器的值和其他相關運行參數,并具備獲取下載或者系統軟件升級的能力。
(2) 車輛和遠程服務中心均具備適當人機接口的先進實時診斷和監控模塊。
(3) 車輛的遠程故障診斷服務中心具有權威的專家負責復雜的診斷和監控并與駕駛者交流。
(4) 保證遠程故障診斷服務中心和相應車輛的數據通訊以及與駕駛者通話的無線網絡。
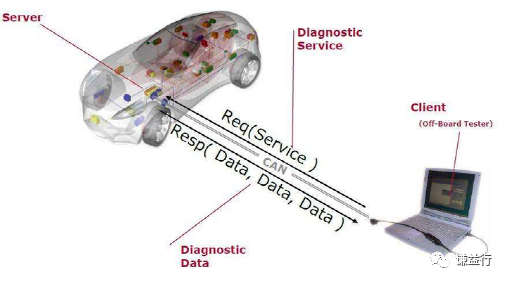
從系統原理圖(圖1)分析可以得出:被診斷的車輛通過無線網絡與車輛信息技術服務中心(telematics service providers,tsp)保持通信。車輛信息技術服務中心不但可以像傳統ISP一樣提供Internet服務,還可以提供安全,GPS,客戶關系管理 等服務。而且,車輛信息技術服務中心還能夠提供專業的故障診斷專家來為車主提供診斷服務。診斷專家通過從車載電子系統傳來的故障碼實時分析車輛的故障程 度。車主也可以通過移動電腦無線上網或者移動電話通過wap來瀏覽車輛信息技術服務中心提供的更加具體的故障碼說明,以及其他導航服務。同時我們的車輛信 息技術服務中心還要掌握有以下資源,如車輛制造商數據中心,道路拯救車輛以及車輛修理,保養店面等。
3 軟件設計
該系統的軟件設計主要分為兩部分:位于車輛信息技術服務中心的專家系統設計和位于車輛的車載故障診斷單元設計。
3.1 專家系統設計
這部分是位于車輛信息技術服務中心的應用程序,除了普通的web服務,GPS服務,跟蹤服務等以外,最主要的是能提供故障的專家診斷。這部分功能由專家系統輔助以現場專家來完成。通過專家系統來盡可能快地給車主反饋故障診斷的信息,并提出解決的專家建議。
開發專家系統,首先需要將汽車維修領域專家的大量實際維修經驗進行匯總和提煉,編成知識庫,構成專家系統的核心部分;然后建立推理機,推理機可根據車載 故障診斷單元發送過來的數據,利用知識庫中的知識,按一定策略進行推理,從而得出診斷結果。專家系統的結構如圖2所示:
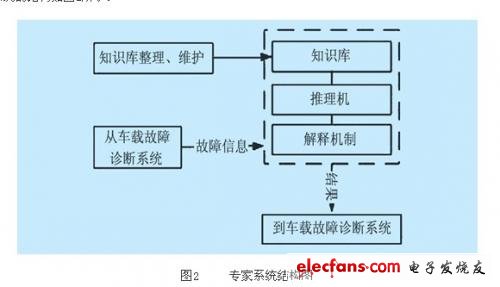
知識庫的建立直接關系到車輛信息技術服務中心服務質量的高低,也影響著車主是否大量采用這個系統,所以收集,整理專家知識的工作特別重要,其難點主要在 于專家知識的收集與表述。因為現在的汽車制造廠商十分繁多,具體的車系更多。雖然現在大部分車輛都提供OBD-II接口,但是從接口中讀出的故障碼的信息 十分有限;各大汽車生產廠商檢測故障用的手持設備與OBD-II通信的協議也各不一致,而且得到的故障碼包含的信息大量的是靠維修工人的經驗來判讀。所以 專家知識的積累與整理顯得十分重要。
在歸納知識時要考慮的因素很多, 為了充分利用專家系統的符號推理能力, 凡是能用數學公式描述的知識, 均作為具體求解器的方法實現,其余的作為規則存儲于知識庫。
規則知識的表示形式為:
規則號 if (前提) then (結論)
前提是一個條件或幾個條件的“and”形式,若是后一種情況,只有在幾個條件都成立時,結論才被接受。每個條件可以是若干項的“or”形式。
以下是一條具體的規則:
rule5:
if
(1) 收到故障碼:p0201
(2) 收到故障碼:p0202
(3) 收到故障碼:p0203
(4) 收到故障碼:p0204
(5) 發動機缸數:8
then
發動機噴油嘴故障嚴重,需馬上修理。
推理機設計時本系統采用了兩級es推理控制策略。結合領域知識,將總體故障分析求解任務分解為不同的子任務,如發動機故障分析子任務、輪胎故障診斷子任 務等。每個子任務有各自的目標求解變量,服從不同的求解方法,彼此之間既相互獨立又存在著相互聯系。通過正向推理求解其目標變量,并將所求結果顯示給車主。
而汽車故障診斷的各子任務間是有一定的依賴關系的,各子任務的求解是有一定的前提條件的,例如,氣缸噴油嘴子任務的求解必須在油嘴線路電壓已知 的前提下才能進行,因而,各求解器中都設置了激活條件,只有滿足了這些條件,求解器才能被激活從而進行目標變量的求解。元級推理機利用此關聯對象集信息按 一定的順序激活相關的求解器進行重新推理。
解釋機制通過與推理機輸出的數據, 回答用戶提出的how、why、what、whether等問題。
3.2 車載故障診斷單元軟件設計
車載故障診斷單元主要負責車載故障數據的讀取,并通過無線網絡()將故障碼實時送到遠程車輛信息技術服務中心,簡單的故障信息,如:一般故障 (不用馬上處理),故障(需馬上修理),嚴重故障(需請求交通拯救)需要及時反饋給車主(包括以文字的方式反饋到車主車載屏上,更緊急的時候通過語音或者 視頻對話來溝通)。更詳細的故障情況車主可以通過移動電腦或者移動電話訪問相關遠程車輛信息技術服務中心的網站來獲取。
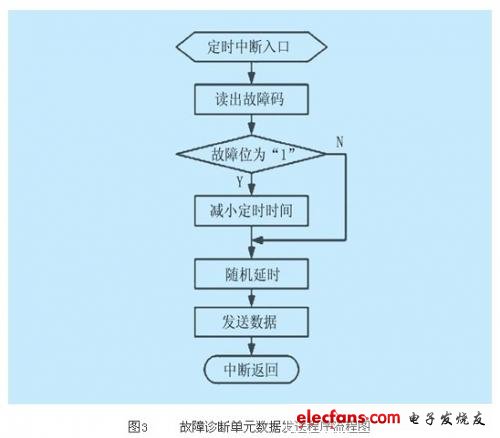
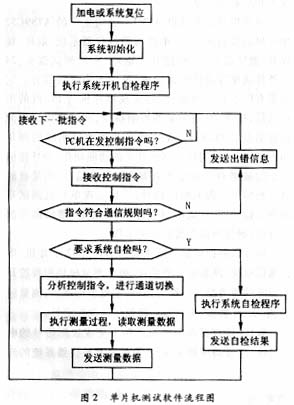
車載故障診斷單元的主程序在執行完初始化功能,再根據當前故障狀態位的值設置定時中斷的時間后,然后就進入低功耗模式。單元讀取故障碼和其他運行數據,以及這些數據的傳 輸都放置在中斷程序,中斷結束立即進入低功耗模式。車輛故障狀態位正常時,可取60min定時中斷一次,調用crc-16校驗計算執行庫后,通過無線方式 發送給遠程車輛信息技術服務中心。在故障狀態位出現多位數值為“1”時,縮短定時中斷時間,增加數據采樣及發送頻率。定時中斷程序流程如圖3所示:
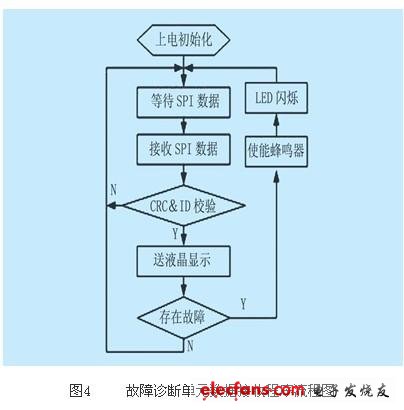
數據接收程序在主程序完成初始化功能后,模塊進入等待SPI數據工作狀態。在接收到一個數據幀,crc校驗(采用查表法實現,減小微控制器cpu占用時 間)和車輛信息技術服務中心id判斷無誤后,送液晶顯示并點亮相應的指示燈以表示各模塊工作正常。當某個模塊出現故障時,啟動led閃爍警告或蜂鳴器報 警。程序流程圖如圖4所示。
4 硬件設計
4.1 車載故障診斷單元
車載故障診斷單元主要由無線模塊(模塊),微控制器(PIC16F874),CAN收發器(MCP2551),CAN控制器(MCP2510)組成,硬件結構如圖5所示。車載通信協議統一采用CAN總線。
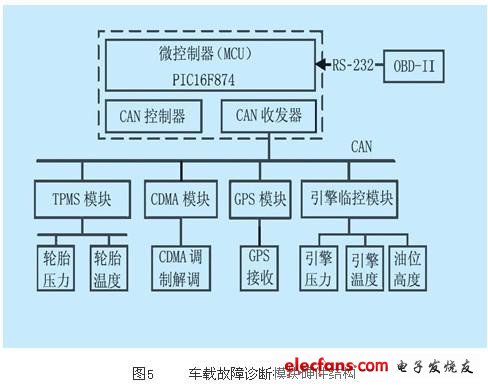
Microchip公司的單片機PIC16F874采用risc指令系統,哈佛總線結構,低功耗,高速度。內部集成了ADC、串行外圍接口 (SPI)和Flash程序存儲器等,具有pwm輸出、lcd驅動等功能。PIC16F874通過SPI接口可以實現與CAN控制器MCP2510的無縫 連接。PIC16F874的I/O資源豐富,共有五個I/O口,每個I/O口除了基本用途外還有一些特殊功能。
CAN通信模塊由CAN 控制器MCP2510和CAN收發器MCP2551組成。MCP2510可以完成CAN總線的物理層和數據鏈路層的所有功能,支持高速SPI接口(最高數 據傳輸速率可以達到5mb/s),支持CAN2.0a/CAN2.0b協議。CAN收發器MCP2551是CAN控制器與物理總線之間的接口,對物理總線 提供差動發送能力,對CAN控制器提供差動接收能力,同時它可以增大通信距離,提高CAN的抗干擾能力。
考慮到與現有OBD-II接口兼容,我們利用微控制器的串口來完成和OBD-II接口的通信。
4.2 車輛信息技術服務中心
車輛信息技術服務中心的硬件設計符合現有標準即可,主要包括服務器的設計,網絡的設計,這部分的硬件設計限于篇幅不再詳細論述。
5 結束語
本文首先分析了車輛遠程故障診斷的現狀,指出了傳統車輛故障診斷的缺點。在基于現有的無線通信網技術的基礎上,首先在國內提出了基于的車輛信息 技術服務概念,包括了車輛故障智能診斷在內,將服務概念延伸到GPS城市導航,車輛跟蹤等各個方面。然后,利用PIC16F874設計了基于CAN總線的 一種車輛遠程故障診斷系統。該系統設計新穎,具備很好的應用前景,有關提供車輛信息技術服務(tsp)的網站也在籌建中。













 工商網監
工商網監
評論