完善資料讓更多小伙伴認識你,還能領取20積分哦,立即完善>
電子發(fā)燒友網(wǎng)技術文庫為您提供最新技術文章,最實用的電子技術文章,是您了解電子技術動態(tài)的最佳平臺。
由于大量的相機和激光雷達特征以及注意力的二次性質(zhì),將 Transformer 架構(gòu)簡單地應用于相機-激光雷達融合問題是很困難的。...

根據(jù)電機的電流,配用大于或等于此電流的驅(qū)動器。如果需要低振動或高精度時,可配用細分型驅(qū)動器。對于大轉(zhuǎn)矩電機,盡可能用高電壓型驅(qū)動器,以獲得良好的高速性能。...
PLS(上升沿微分指令) 在輸入信號上升沿產(chǎn)生一個掃描周期的脈沖輸出 (2)PLF(下降沿微分指令) 在輸入信號下降沿產(chǎn)生一個掃描周期的脈沖輸出。...

伺服電缸通常采用閉環(huán)控制系統(tǒng),通過反饋信號實時調(diào)整電機的轉(zhuǎn)速和位置,以達到精確的運動控制。而伺服壓機一般采用閉環(huán)或開環(huán)控制系統(tǒng),通過控制液壓系統(tǒng)或壓力傳感器實時調(diào)整壓力或力量,以滿足加工需求。...
梯形圖基本畫法 不宜使用雙線圈輸出 觸點可以串聯(lián)、并聯(lián),線圈只能并聯(lián)線圈右邊無觸點 輸出線圈不能不經(jīng)過任何接點直接接在兩個邏輯電源線之間。 觸點、線圈都應有編號,以相互區(qū)別程序結(jié)束以“END“為標記...

該伺服驅(qū)動器采用有2個相同的伺服電機驅(qū)動板,電機編碼器信號通過接口反饋給控制芯片。伺服電機控制信號通過光耦連接到后端伺服電機驅(qū)動芯片控制端。...

功能模塊包括通訊模塊、定位模塊、脈沖輸出模塊、高速計數(shù)模塊、PID控制模塊、溫度控制模塊等。選擇PLC時應考率到功能模塊配套的可能性,選擇功能模塊涉及硬件與軟件兩個方面。...
電驅(qū)動系統(tǒng)由驅(qū)動電機、電機控制器和減速器三個部分組成(圖1、圖2)。在車輛行駛過程中,驅(qū)動電機通過來自動力蓄電池的電能產(chǎn)生驅(qū)動力,并在減速過程中將車輛動能產(chǎn)生的電能為動力蓄電池充電。...

借助SCL,可以簡化控制技術領域復雜的計算、算法、數(shù)據(jù)管理和數(shù)據(jù)組織等編程工作。...

工業(yè)相機采集光信號,由模擬信號轉(zhuǎn)換為數(shù)字信號的速度往往是很快的,但是由于相機數(shù)據(jù)傳輸接口速度的限制,實際從相機處理器傳輸?shù)絇C的速度會大打折扣。...

以U相繞組為例,說明其接線規(guī)律:因為兩個相鄰的極相組處在不同極性的磁極下,所以,它們的電流繞行方向是相反的。于是得到兩個相鄰極相組之間的接線規(guī)律:下層邊與下層邊相接,上層邊與上層邊相接。...

伺服脈沖控制方式通過高速脈沖信號對伺服電機進行精確控制,能夠?qū)崿F(xiàn)高精度的定位和速度調(diào)節(jié),提高生產(chǎn)效率和產(chǎn)品質(zhì)量。...
在輪胎生產(chǎn)過程中,每個輪胎都會被打上一系列的編碼,包括輪胎型號、生產(chǎn)日期、生產(chǎn)批次等信息。傳統(tǒng)的人工讀碼方式需要依靠人眼進行識別,效率低下且容易出錯。...

在監(jiān)控系統(tǒng)中,我們經(jīng)常需要在“手動”和“自動”等控制模式之間進行切換。在程序設計中,我們可以使用MOV指令來實現(xiàn)這一需求。例如,當選擇“手動”模式時,將常數(shù)1MOV到一個寄存器VB10中...

繼電器控制:通過觸點開關實現(xiàn)控制,動作受繼電器硬件限制,通常超過10ms PLC控制:由半導體電路實現(xiàn)控制,指令執(zhí)行時間短,一般為微秒級...
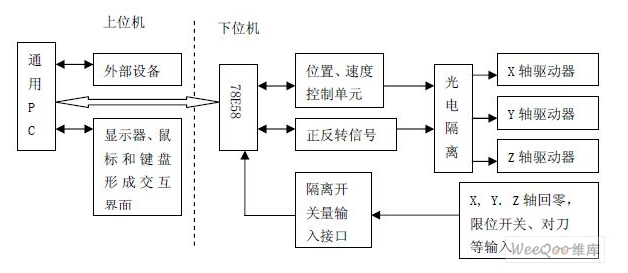
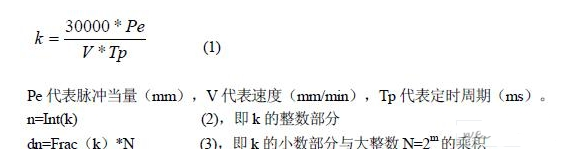
加減速控制是CNC 系統(tǒng)的關鍵技術之一,也是實現(xiàn)數(shù)控系統(tǒng)高實時性的瓶頸。在CNC裝置中,為了保證機床在啟動或停止時不產(chǎn)生沖擊、失步、超程或振蕩,必須對進給電機的脈沖頻率或電壓進行加減速控制。...
步進電機具有快速啟停能力強、高、轉(zhuǎn)速容易控制的特點。但是,步進電動機應避免轉(zhuǎn)動速率的突變,而且從停止到開始轉(zhuǎn)動有一個較低的起動頻率,隨后才可以平緩地過渡到較高的轉(zhuǎn)速。相應地在步進電機制動時,也應該平緩過渡。...
關注我們的微信

下載發(fā)燒友APP

電子發(fā)燒友觀察

版權所有 ? 湖南華秋數(shù)字科技有限公司
長沙市望城經(jīng)濟技術開發(fā)區(qū)航空路6號手機智能終端產(chǎn)業(yè)園2號廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號-1




