無刷直流電動機的組成與工作原理
(1)無刷電動機的組成
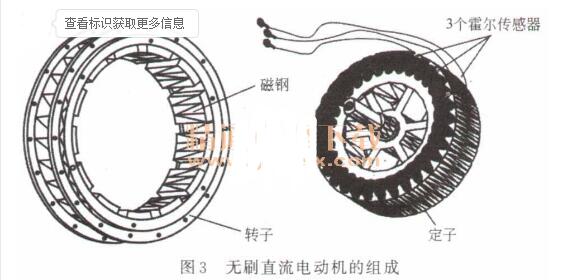
無刷直流電動機由轉子和定子兩大部分組成,如圖3所示。
(2)無刷直流電動機的工作原理
無刷直流電動機采用方波自控式永磁同步電動機,以霍爾傳感器取代電刷換向器,霍爾傳感器的信號線傳遞電動機里面磁鋼相對于繞組線圈的位根據3個霍爾傳感器的信號能知道此時應該怎樣給電動機的線圈供電(不同的霍爾信應該給電動機繞組提供相對應方向的電流),也就是說霍爾傳感器狀態不一樣,線圈的置號電流方向不一樣。
霍爾信號傳遞給控制器,控制器通過粗線(不是霍爾線)給電動機繞組供電,電動機旋轉,磁鋼與繞組(準確地說是纏在定子上的線圈,其實霍爾一般安裝在定子上)發生轉動,霍爾傳感器感應出新的位置信號,控制器粗線又給重新改變電流方向的電動機繞組供電,電動機繼續旋轉(當繞組和磁鋼的位置發生變化時,繞組必須對應地改變電流方向,這樣電動機才能繼續向一個方向運動,否則電動機就會在某一個位置左右擺動,而不是連續旋轉),這個過程就是電子換向。
無刷直流電動機由直流電源供電,借助位置傳感器來檢測轉子的位置,所檢測出的信號觸發相應的電子換相線路,以實現無接觸式換相。
無刷直流電動機用電子開關和位置傳感器代替電刷及換向器,將直流電轉換成模擬三相交流電,通過調制脈寬,改變其電流大小來改變轉速。
直流無刷電機的控制結構
直流無刷電機是同步電機的一種,也就是說電機轉子的轉速受電機定子旋轉磁場的速度及轉子極數(P)影響:
N=120.F/P。在轉子極數固定情況下,改變定子旋轉磁場的頻率就可以改變轉子的轉速。直流無刷電機即是將同步電機加上電子式控制(驅動器),控制定子旋轉磁場的頻率并將電機轉子的轉速回授至控制中心反復校正,以期達到接近直流電機特性的方式。也就是說直流無刷電機能夠在額定負載范圍內當負載變化時仍可以控制電機轉子維持一定的轉速。
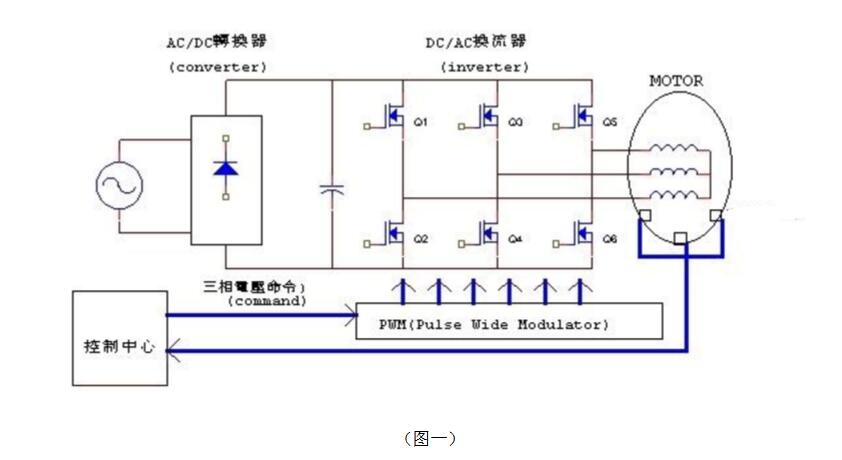
直流無刷驅動器包括電源部及控制部如圖(1):電源部提供三相電源給電機,控制部則依需求轉換輸入電源頻率。
電源部可以直接以直流電輸入(一般為24V)或以交流電輸入(110V/220V),如果輸入是交流電就得先經轉換器(CONVERTER)轉成直流。不論是直流電輸入或交流電輸入要轉入電機線圈前須先將直流電壓由換流器(INVERTER)轉成3相電壓來驅動電機。換流器(INVERTER)一般由6個功率晶體管(Q1~Q6)分為上臂(Q1、Q3、Q5)/下臂(Q2、Q4、Q6)連接電機作為控制流經電機線圈的開關。控制部則提供PWM(脈沖寬度調制)決定功率晶體管開關頻度及換流器(INVERTER)換相的時機。直流無刷電機一般希望使用在當負載變動時速度可以穩定于設定值而不會變動太大的速度控制,所以電機內部裝有能感應磁場的霍爾傳感器(HALL-SENSOR),做為速度之閉回路控制,同時也做為相序控制的依據。但這只是用來做為速度控制并不能拿來做為定位控制。