直流無刷電機的控制原理
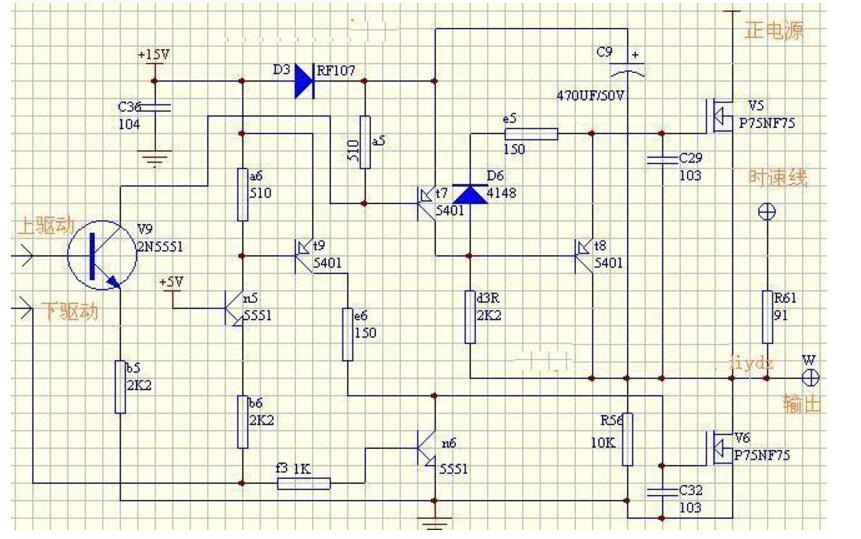
要讓電機轉動起來,首先控制部就必須根據HALL-SENSOR感應到的電機轉子目前所在位置,然后依照定子繞線決定開啟(或關閉)換流器(INVERTER)中功率晶體管的順序,如下(圖二)INVERTER中之AH、BH、CH(這些稱為上臂功率晶體管)及AL、BL、CL(這些稱為下臂功率晶體管),使電流依序流經電機線圈產生順向(或逆向)旋轉磁場,并與轉子的磁鐵相互作用,如此就能使電機順時/逆時轉動。當電機轉子轉動到HALL-SENSOR感應出另一組信號的位置時,控制部又再開啟下一組功率晶體管,如此循環電機就可以依同一方向繼續轉動直到控制部決定要電機轉子停止則關閉功率晶體管(或只開下臂功率晶體管);要電機轉子反向則功率晶體管開啟順序相反。
基本上功率晶體管的開法可舉例如下:
AH、BL一組→AH、CL一組→BH、CL一組→BH、AL一組→CH、AL一組→CH、BL一組,但絕不能開成AH、AL或BH、BL或CH、CL。此外因為電子零件總有開關的響應時間,所以功率晶體管在關與開的交錯時間要將零件的響應時間考慮進去,否則當上臂(或下臂)尚未完全關閉,下臂(或上臂)就已開啟,結果就造成上、下臂短路而使功率晶體管燒毀。

當電機轉動起來,控制部會再根據驅動器設定的速度及加/減速率所組成的命令(COMMAND)與HALL-SENSOR信號變化的速度加以比對(或由軟件運算)再來決定由下一組(AH、BL或AH、CL或BH、CL或……)開關導通,以及導通時間長短。速度不夠則開長,速度過頭則減短,此部份工作就由PWM來完成。PWM是決定電機轉速快或慢的方式,如何產生這樣的PWM才是要達到較精準速度控制的核心。高轉速的速度控制必須考慮到系統的CLOCK分辨率是否足以掌握處理軟件指令的時間,另外對于HALL-SENSOR信號變化的資料存取方式也影響到處理器效能與判定正確性、實時性。至于低轉速的速度控制尤其是低速起動則因為回傳的HALL-SENSOR信號變化變得更慢,怎樣擷取信號方式、處理時機以及根據電機特性適當配置控制參數值就顯得非常重要。或者速度回傳改變以ENCODER變化為參考,使信號分辨率增加以期得到更佳的控制。電機能夠運轉順暢而且響應良好,P.I.D.控制的恰當與否也無法忽視。之前提到直流無刷電機是閉回路控制,因此回授信號就等于是告訴控制部現在電機轉速距離目標速度還差多少,這就是誤差(ERROR)。知道了誤差自然就要補償,方式有傳統的工程控制如P.I.D.控制。但控制的狀態及環境其實是復雜多變的,若要控制的堅固耐用則要考慮的因素恐怕不是傳統的工程控制能完全掌握,所以模糊控制、專家系統及神經網絡也將被納入成為智能型P.I.D.控制的重要理論。
48V無刷電機電動車接線原理
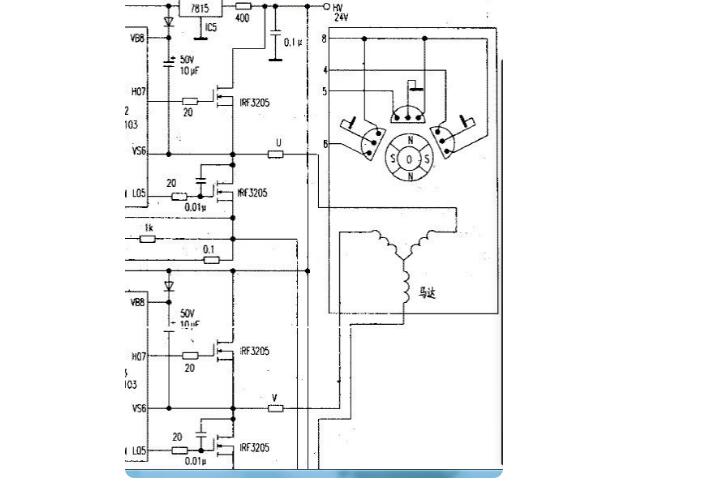
八根線,三根粗線是黃藍綠個別車不一樣,五根霍爾線,紅黑藍綠黃。五根霍爾線里面紅黑絕對不可以接錯顏色,其他三根細線按顏色接。三根粗線按顏色接,接上之后也可能會電機發抖,不轉,反轉,可以把三根粗線隨意搭配連接,細線除了紅黑不能亂,其他的三根也可以隨意搭配連接。