摘 要: 提出了一種基于ZigBe e 無線傳感器網絡和模糊控制技術的新型室內照明控制系統。系統通過ZigBe e無線傳感器網絡采集相關環境信息,并傳輸照明控制指令,將環境信息作為模糊控制器的輸入量,建立模糊控制規則庫,實現室內照明的模糊控制。該系統具有實用、經濟、節能等優勢,尤其適用于家庭應用。
0 引 言
隨著2009 年哥本哈根氣候變化會議的召開,全世界都在提倡更加節能環保的生活方式。
抑制碳排放、應對氣候變化的重要措施之一就是發展室內照明控制系統,提高照明效率。
近年來,國內外針對室內照明控制系統開展了大量的研究。ZigBee無線傳感網絡與模糊控制技術分別被引入室內照明控制的研究中,為室內照明控制的進一步研究提供了良好的思路,但結合兩者構建的室內照明控制系統還并不多見。
本文結合ZigBee 無線傳感網絡與模糊控制技術,設計了新型室內照明控制系統。由于自然光可提供室內部分或全部的照明需要,該系統充分利用自然光, 通過對百葉窗旋轉角度的控制,引入自然光作為光源, 人工照明為補充,從而使室內照明既可以滿足人們對照明的需要,又可以達到節能的目的。
1 系統總體設計
整個系統由ZigBee無線傳感器網絡、基站和遠程監控中心組成,總體結構如圖1所示。每個房間都布置有檢測環境信息的傳感器、自然光控制器和人工照明控制器。通過傳感器采集房間的照度、人員位置等各個環境信息,并經由Zig2Bee無線傳感器網絡傳輸至基站PC機。基站PC機對相關信息自動進行分析處理,計算房間所需引入自然光量及補充的人工照明量,確定照明模式,并通過ZigBee無線傳感器網絡將結果輸出,以控制人工照明控制器和自然光控制器的工作,從而實現室內照明的自動控制。基站PC機還可以實時顯示各個設備的相關信息,并通過無線通信方式將信息傳輸到用戶手中(遠程監控中心)。
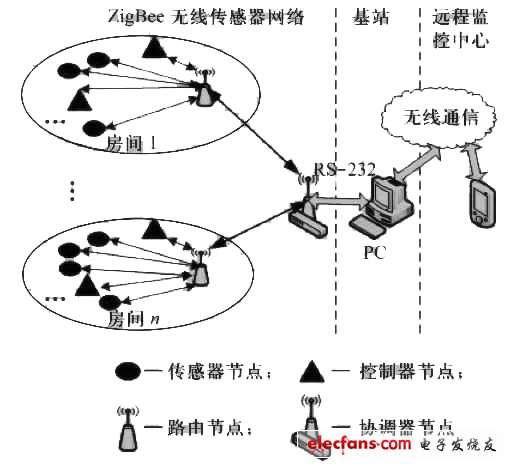
圖1 系統總體結構圖
在該系統中, ZigBee無線傳感器網絡采用星狀網絡拓撲結構,節點分為四類:傳感器節點、控制器節點、路由節點和協調器節點。傳感器節點嵌入多種傳感器,用于讀取并傳輸照明控制所需的相關環境信息。控制器節點嵌入自然光控制板和人工照明控制板,以控制引入的自然光量和補充的人工照明量;此外,控制器節點還有中斷響應功能,能夠處理用戶的控制指令。路由節點接收該房間傳感器節點采集的相關信息,并將其傳輸至協調器節點,再將協調器節點的控制指令傳輸至傳感器節點和控制器節點。協調器節點與基站PC機通過RS2232串口相連接,用于所有網絡節點的地址分配和管理,并能夠監控各種信息的發送與接收。
基站負責控制整個網絡,既需要完成無線傳感器網絡節點信息的采集,又需要完成所采集信息的分析處理及控制輸出,以完成室內照明的模糊控制,并達到節能的目的。通過PC機軟件用戶界面,顯示整個系統網絡的拓撲結構圖和各節點的工作狀況及采集的實時數據信息;查詢各個房間的歷史及實時數據;具有遠程設置功能,用戶可通過遠程監控中心設置某些房間的照明模式,如全開/全關等;同時還具備設備管理和用戶管理等功能,軟件可實時更新設備和無線傳感網絡節點信息,具有設備更新的自適應能力,并通過用戶管理保證了系統使用的安全性。
2 ZigBee網絡節點設計
ZigBee網絡節點設計是硬件設計的核心,該系統節點采用模塊化設計, 4種節點采用共同的核心模塊,不同類型節點配以不同的擴展模塊。
網絡節點以Freescale公司的MC13192芯片和Philip公司的LPC2138芯片為核心構成了核心板。MC13192具有一個優化的數字核心,能夠幫助降低MCU處理功率,并縮短其執行周期。
除了接收、發送和空閑3 種工作狀態外,芯片還有3種低功耗運行模式:掉電模式、睡眠模式、休眠模式。其工作頻率是2. 405~2. 480 GHz,并在頻帶內劃分16個信道,每個信道占用5 MHz的帶寬,采用直接序列擴頻的通信技術,數據傳輸速率為250 kb / s.芯片采用可編程功率輸出模式,發送功率為0~4 dBm,接收靈敏度可以達到92 dBm,傳輸距離為30~70 m.LPC2138芯片是支持實時仿真和嵌入式跟蹤的32 bit ARM 7微控制器。它帶有512 KB嵌入的高速F lash存儲器和32 KB片內靜態RAM以及多個串行接口, 2個8通道10 bit A /D轉換器, 1個D /A轉換器和47個GP IO,以及多達9個邊沿或電平觸發的外部中斷。
LPC2138有兩種低功耗模式:空閑模式和掉電模式。由于具有較小的封裝和極低的功耗,使LPC2138可以理想地與MC13192結合,作為基于ZigBee技術的無線傳感器網絡節點。LPC2138和MC13192通過SP I總線連接。LPC2138通過4線SP I接口對MC13192 的內部寄存器進行讀寫操作,從而完成對MC13192 的控制以及數據通信。由傳感器輸出的模擬信號經過8 通道10 bit A/D變換后輸入到L PC2138中, LPC2138將傳感器采集的信號經處理后從天線發射出去。
對傳感器的控制信號可以從天線接收進來,經過解調、解擴得到原始的數據, 再通過SPI傳送到LPC2138 上, 經過LPC2138 判斷處理后通過GPIO口傳送到傳感器上, 以實現對傳感器的控制。
核心板與各種傳感器相連構成傳感器節點,與自然光控制板和人工照明控制板相連構成控制器節點,擴展串行通信接口后構成協調器節點與基站PC機實現通信,擴展供電接口與電源模塊相連。節點硬件框架如圖2所示。
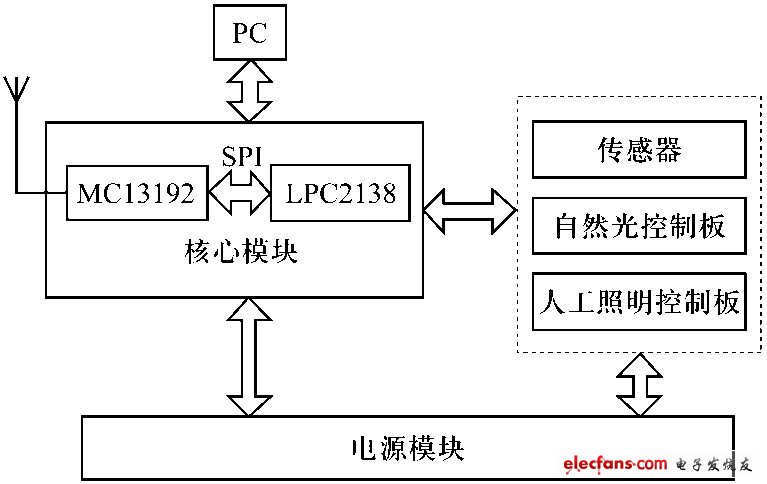
圖2 Z igBee網絡節點硬件框架圖
根據節點類型、節點需要的發射功率和能耗,電源模塊分為市電、太陽能與電池3種。協調器節點發射功率大, 采用市電供電;控制器節點與控制板相連,以驅動相應電路進行自然光及人工照明控制,因此,控制器節點可以和控制板同樣采用市電供電;室外傳感器節點采用太陽能供電;其他節點采用電池供電。
3 照明控制設計
照明控制設計需要避免眩光,盡可能利用自然光作為光源,以人工照明為補充,滿足室內人員的照明需要。為了避免眩光,保護視力,需要確定百葉窗的最大旋轉角度。為了滿足室內人員對照明的需要,需要確定百葉窗的理想旋轉角度。通過對兩者進行比較,可以確定百葉窗旋轉角度。當理想旋轉角度《最大旋轉角度,則把百葉窗旋轉到理想角度,人工照明關閉,反之,如果理想旋轉角度》最大旋轉角度,則使百葉窗保持在最大旋轉角度,不足的照明通過人工照明進行補充。其整體思路流程圖如圖3所示。
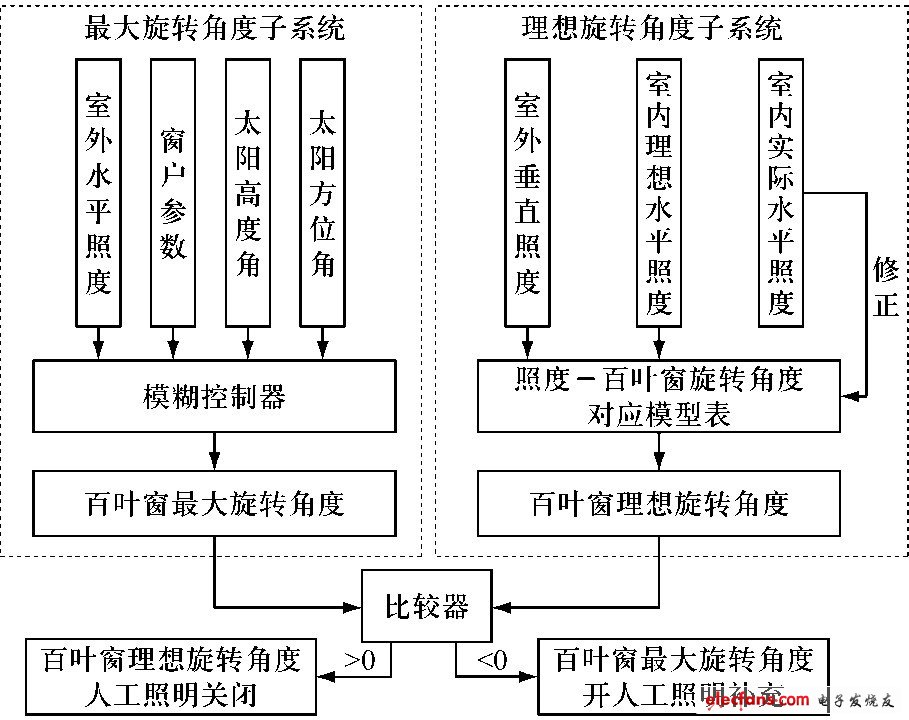
圖3 照明控制流程圖
3. 1 最大旋轉角度子系統
最大旋轉角度子系統的任務是得到避免眩光基礎上百葉窗的最大旋轉角度。該子系統選用模糊控制器實現, 輸入為室外水平照度、窗戶參數、太陽高度角和太陽方位角,輸出為百葉窗的最大旋轉角度。
3. 1. 1 輸入量的獲取
室外水平照度可由傳感器獲得,窗戶參數由具體房間窗戶相關信息確定,式(1)和式(2)分別用來計算太陽高度角和太陽方位角。
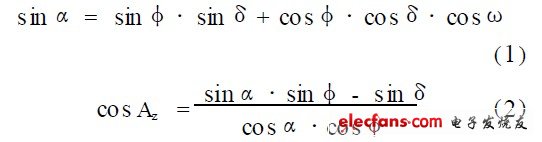
其中:α為太陽高度角; Az 為太陽方位角; φ為房間的地理緯度;δ為赤緯; ω為時角。以上單位均為度。
在計算太陽高度角和太陽方位角所需的三個值中,房間的地理緯度(φ)可由房間的具體位置確定,赤緯(δ)和時角(ω)則需另外計算得到。
赤緯(δ)表示太陽光線與地球赤道面的夾角,可通過式(3)計算得到。

其中: n為一年中某日的日期序數。
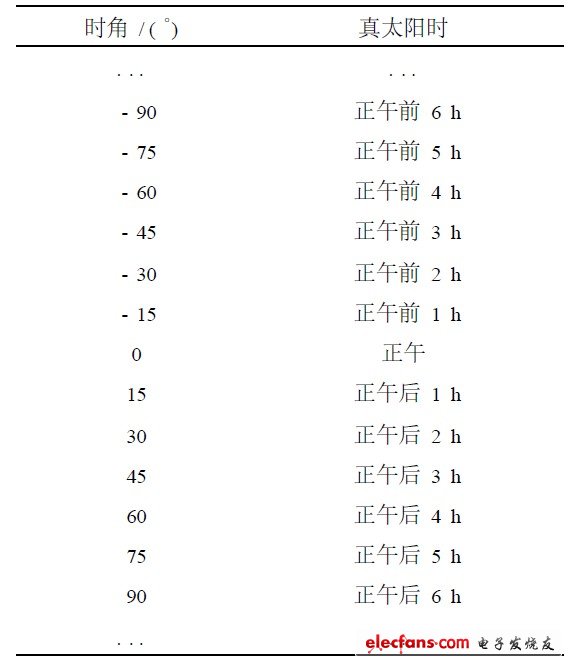
時角(ω)以當地真太陽時正午為0 °,下午為正,上午為負,每小時15°,如表1所示。
表1 時角
3.1.2 模糊控制規則。
對該系統而言,制定模糊控制規則的主要依據是避免眩光,即當太陽位置接近于水平其直射,光照影響人們的視力時應關閉百葉窗;當只有漫射光時, 對百葉窗的最大旋轉角度沒有要求。
3. 2 理想旋轉角度子系統
百葉窗理想旋轉角度子系統的任務是得到在自然光提供的室內水平照度滿足用戶需要時百葉窗的理想旋轉角度。由大量實際測量的經驗數據可以建立自然光在室外的垂直照度、自然光在室內提供的水平照度,以及百葉窗旋轉角度的- 百葉窗旋轉角度對應模型表。根據自然光在室外的垂直照度和用戶自定義設置的室內理想水平照度值,通過查詢照度- 百葉窗旋轉角度對應模型表可以得到百葉窗的理想旋轉角度。
在這里不直接應用室內實際水平照度值, 而是將其用來檢驗并修正模型表,這樣做既可避免閉環控制的產生,又能夠在傳感器暫時出錯的情況下保持較好的控制。
4 結 語
本文介紹了一種基于ZigBee無線傳感器網絡和模糊控制的新型室內照明控制系統。該系統綜合考慮了室內的遮陽系統與照明系統之間的相互聯系, 整個系統最大限度地利用了天然光,通過對百葉窗旋轉角度的控制,引入自然光作為光源,并以人工照明為補充使室內照明滿足用戶的需要。該系統能夠有效地降低照明系統能耗,為人們構建節能、舒適的居住環境提供了一個有效方案。