完善資料讓更多小伙伴認(rèn)識(shí)你,還能領(lǐng)取20積分哦,立即完善>
電子發(fā)燒友網(wǎng)技術(shù)文庫(kù)為您提供最新技術(shù)文章,最實(shí)用的電子技術(shù)文章,是您了解電子技術(shù)動(dòng)態(tài)的最佳平臺(tái)。
協(xié)作機(jī)器人(簡(jiǎn)稱:cobots)越來(lái)越多地出現(xiàn)在制造業(yè)中,它們?cè)诠蚕韰^(qū)域與人類一起工作。在人機(jī)協(xié)作工廠中,避免協(xié)作機(jī)器人和人類同事發(fā)生碰撞,確保生產(chǎn)安全是至關(guān)重要的。...

機(jī)械臂對(duì)精度和運(yùn)動(dòng)穩(wěn)定性的要求較高,因此計(jì)算量大、周期短,比移動(dòng)機(jī)器人一般要高1到2個(gè)量級(jí)。移動(dòng)機(jī)器人一般對(duì)同步精度要求不高,其配置相對(duì)較低。...

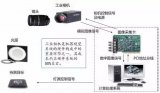
從功能上來(lái)看,典型的機(jī)器視覺(jué)系統(tǒng)可以分為:圖像采集部分、圖像處理部分和運(yùn)動(dòng)控制部分。...
本文探討了在嘈雜環(huán)境中利用機(jī)器學(xué)習(xí)技術(shù)進(jìn)行機(jī)械臂動(dòng)作識(shí)別的問(wèn)題。通過(guò)使用視覺(jué)系統(tǒng)和深度學(xué)習(xí)模型,作者提出的方法在3x3網(wǎng)格環(huán)境中的井字棋游戲案例中得到驗(yàn)證。...

采用 XYZ 參考法時(shí),首先使用已知的工具移向一個(gè)參考點(diǎn),然后使用待測(cè)工具移向參考點(diǎn)。機(jī)器人控制器比較法蘭位置,并計(jì)算出新工具的 TCP。...

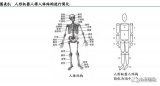
人形機(jī)器人誕生已有30 余年,由技術(shù)驗(yàn)證期向初步商業(yè)化過(guò)渡,產(chǎn)品行動(dòng)能力隨技術(shù)突 破不斷提高。人形機(jī)器人的發(fā)展歷程主要分為三個(gè)階段。...
史陶比爾示教器常見(jiàn)故障及維修處理方案 1、示教器觸摸不良或局部不靈(更換觸摸面板) 2、示教器無(wú)顯示(維修或更換內(nèi)部主板或液晶屏) 3、示教器顯示不良、豎線、豎帶、花屏等(更換液晶屏) 4、示教器按鍵不良或不靈(更換按鍵面板)...

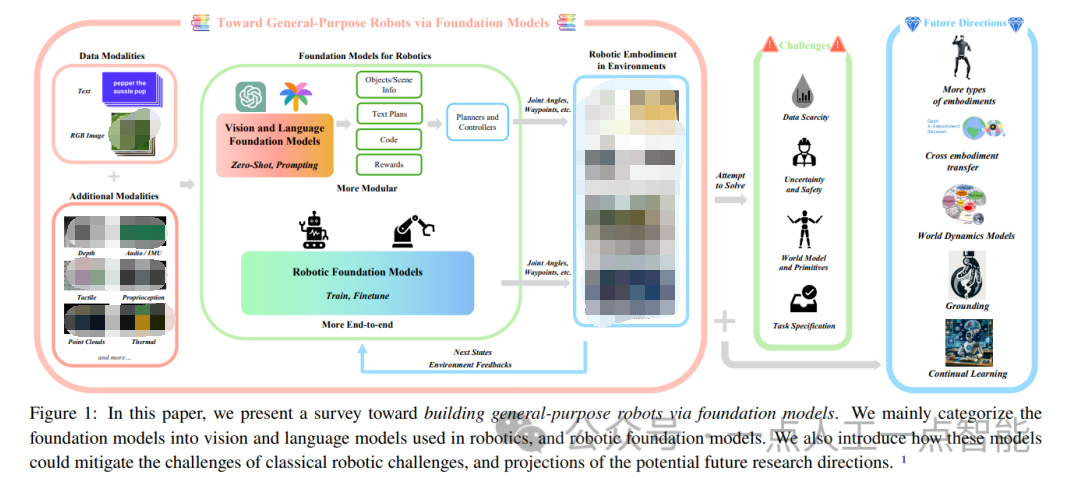
機(jī)器人是一種擁有無(wú)盡可能性的技術(shù),尤其是當(dāng)搭配了智能技術(shù)時(shí)。近段時(shí)間創(chuàng)造了許多變革性應(yīng)用的大模型有望成為機(jī)器人的智慧大腦,幫助機(jī)器人感知和理解這個(gè)世界并制定決策和進(jìn)行規(guī)劃。...
工業(yè)機(jī)器人在惡劣條件下運(yùn)行,即使設(shè)計(jì)時(shí)進(jìn)行完善的設(shè)計(jì)規(guī)范,維護(hù)率可以降低,但是,仍必須定期進(jìn)行常規(guī)檢查和預(yù)防性維護(hù)。...

首先,攝像頭的“眼睛”會(huì)捕捉到目標(biāo)物體的圖像信息,無(wú)論是簡(jiǎn)單的形狀還是復(fù)雜的紋理,都會(huì)被一一記錄下來(lái)。這些圖像信息隨后被轉(zhuǎn)化為電信號(hào),傳遞給機(jī)器人的“大腦”——圖像處理系統(tǒng)。...
最大數(shù)量/BRAKE最多可以同時(shí)聲明64個(gè)中斷。中斷的聲明可以隨時(shí)被新的聲明覆蓋。可以選擇使用BRAKE聲明中斷。BRAKE語(yǔ)句在檢測(cè)到聲明的中斷時(shí)立即執(zhí)行。這意味著當(dāng)進(jìn)入中斷程序時(shí),制動(dòng)過(guò)程已經(jīng)開(kāi)始。...

使用FANUC機(jī)器人進(jìn)行作業(yè)之前,必須對(duì)相關(guān)工作人員進(jìn)行培訓(xùn),未經(jīng)過(guò)培訓(xùn)的人員不得隨意更改設(shè)置、不能隨意進(jìn)行操作。...
安裝在示教器上的使能設(shè)備按鈕(Enabling device),當(dāng)按下一半時(shí),系統(tǒng)變?yōu)殡?MOTORS ON)模式。當(dāng)松開(kāi)或全部按下按鈕時(shí),系統(tǒng)變?yōu)殡姍C(jī)關(guān)(MOTORS OFF)模式。...

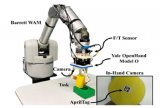
ByteDance Research 基于開(kāi)源的多模態(tài)語(yǔ)言視覺(jué)大模型 OpenFlamingo 開(kāi)發(fā)了開(kāi)源、易用的 RoboFlamingo 機(jī)器人操作模型,只用單機(jī)就可以訓(xùn)練。...

海康機(jī)器人控制系統(tǒng)涵蓋了RCS-2000 V4.0和RCS-Lite輕量級(jí)調(diào)度控制器,這兩款控制系統(tǒng)在性能、效率、可靠性和擴(kuò)展性方面實(shí)現(xiàn)了質(zhì)的飛躍。為客戶提供了更易用、更靈活、更低成本和更快交付的體驗(yàn)。...

機(jī)器人與視覺(jué)標(biāo)定理論詳解 A(x,y)繞B(rx0,ry0)旋轉(zhuǎn)a度后的位置為C(x0,y0),則有如下關(guān)系式: x0= cos (a) * (x-rx0) – sin (a) * (y-ry0) +rx0 y0= cos (a) * (y-ry0) + sin (a) * (x-rx0) +ry0...

自主控制技術(shù)研究至今,先后出現(xiàn)了多種體系結(jié)構(gòu)形式,目前被廣泛應(yīng)用于實(shí)踐的是分布式體系結(jié)構(gòu),其各個(gè)功能模塊作為相對(duì)獨(dú)立的單元參與整個(gè)體系。...

根據(jù)CMR產(chǎn)業(yè)聯(lián)盟數(shù)據(jù),新戰(zhàn)略移動(dòng)機(jī)器人產(chǎn)業(yè)研究所統(tǒng)計(jì),2022年度,中國(guó)市場(chǎng)企業(yè)整體銷售工業(yè)應(yīng)用移動(dòng)機(jī)器人(AGV/AMR)93000臺(tái),較2021年增長(zhǎng)29.17%,市場(chǎng)銷售額達(dá)到185億元,同比增長(zhǎng)46.83%。...

基礎(chǔ)模型在解決機(jī)器人技術(shù)中的數(shù)據(jù)稀缺問(wèn)題上至關(guān)重要。它們?yōu)槭褂米钌俚奶囟〝?shù)據(jù)學(xué)習(xí)和適應(yīng)新任務(wù)提供了堅(jiān)實(shí)的基礎(chǔ)。...

控制柔度接觸形成的理論是,約束可以不斷添加,直到插入任務(wù)完成。值得注意的是,任何當(dāng)前不受約束的自由度都可以被控制以執(zhí)行其他任務(wù),而無(wú)需修改系統(tǒng)的當(dāng)前CF。...
關(guān)注我們的微信

下載發(fā)燒友APP

電子發(fā)燒友觀察

版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長(zhǎng)沙市望城經(jīng)濟(jì)技術(shù)開(kāi)發(fā)區(qū)航空路6號(hào)手機(jī)智能終端產(chǎn)業(yè)園2號(hào)廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1





