 電子發燒友App
電子發燒友App


STM學習筆記——用定時器實現熒火蟲燈
在第6篇筆記中,我用軟件延時的方法實現了熒火蟲,學了定時器,當然就要用一用定時器了,這里仍是用熒火蟲燈為例。
用ST庫所帶的例子Tim中的TimBase為例來修改,這個例子的位置以及如何建立工程請參考第7篇筆記,這里就不再重復了,下面簡述一下修改的過程。
(1) 由于我的板子上的燈是由PD8~PD11來控制的,因此,要將
void RCC_Configuration(void)
中的:
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE); //打開GPIOC的時鐘
改為
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOD, ENABLE); //打開GPIOD的時鐘
(2) 將四個通道全部設置為TIM_OCMode_Toggle模式,即將
/* Output Compare Timing Mode configuration: Channel1 *
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_Timing;
改為:
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_Toggle;
(3)例子中原來中斷產生的頻率很低,是不適合于做這種熒火蟲燈的,但為了比較,我只改了最后一個值:
__IO uint16_t CCR4_Val = 8192;改為
__IO uint16_t CCR4_Val = 2048;
這樣,這個通道的中斷頻率變為
CC4 update rate = TIM2 counter clock / CCR4_Val = 3515.6 Hz
(4) 到stm32f10x_it.c中作修改中斷處理函數如下:
uint8_t allCount=16;
uint8_t upDown1,upDown2,upDown3,upDown4;
void TIM2_IRQHandler(void)
{ static uint8_t Count1,Count2,Count3,Count4;
static uint8_t hCnt1,hCnt2,hCnt3,hCnt4;
if (TIM_GetITStatus(TIM2, TIM_IT_CC1) != RESET)
{
TIM_ClearITPendingBit(TIM2, TIM_IT_CC1);
if(Count1《hCnt1)
{ GPIO_SetBits(GPIOD, GPIO_Pin_8); //點亮燈
}
else
{ GPIO_ResetBits(GPIOD, GPIO_Pin_8); //熄滅燈
}
Count1++;
if(Count1》=allCount)
{ Count1=0;
if(upDown1)
{ hCnt1++;
if(hCnt1》=(allCount-1))
upDown1=!upDown1;
}
else
{ hCnt1--;
if(hCnt1《2)
upDown1=!upDown1;
}
}
capture = TIM_GetCapture1(TIM2);
TIM_SetCompare1(TIM2, capture + CCR1_Val);
}
else if (TIM_GetITStatus(TIM2, TIM_IT_CC2) != RESET)
{
TIM_ClearITPendingBit(TIM2, TIM_IT_CC2);
if(Count2《hCnt2)
{ GPIO_SetBits(GPIOD, GPIO_Pin_9); //點亮燈
}
else
{ GPIO_ResetBits(GPIOD, GPIO_Pin_9); //熄滅燈
}
Count2++;
if(Count2》=allCount)
{ Count2=0;
if(upDown2)
{ hCnt2++;
if(hCnt2》=(allCount-1))
upDown2=!upDown2;
}
else
{ hCnt2--;
if(hCnt2《2)
upDown1=!upDown1;
}
}
capture = TIM_GetCapture2(TIM2);
TIM_SetCompare2(TIM2, capture + CCR2_Val);
}
else if (TIM_GetITStatus(TIM2, TIM_IT_CC3) != RESET)
{
TIM_ClearITPendingBit(TIM2, TIM_IT_CC3);
if(Count3《hCnt3)
{ GPIO_SetBits(GPIOD, GPIO_Pin_10); //點亮燈
}
else
{ GPIO_ResetBits(GPIOD, GPIO_Pin_10); //熄滅燈
}
Count3++;
if(Count3》=allCount)
{ Count3=0;
if(upDown3)
{ hCnt3++;
if(hCnt3》=(allCount-1))
upDown3=!upDown3;
}
else
{ hCnt3--;
if(hCnt3《2)
upDown3=!upDown3;
}
}
capture = TIM_GetCapture3(TIM2);
TIM_SetCompare3(TIM2, capture + CCR3_Val);
}
else
{
TIM_ClearITPendingBit(TIM2, TIM_IT_CC4);
if(Count4《hCnt4)
{ GPIO_SetBits(GPIOD, GPIO_Pin_11); //點亮燈
}
else
{ GPIO_ResetBits(GPIOD, GPIO_Pin_11); //熄滅燈
}
Count4++;
if(Count4》=allCount)
{ Count4=0;
if(upDown4)
{ hCnt4++;
if(hCnt4》=(allCount-1))
upDown4=!upDown4;
}
else
{ hCnt4--;
if(hCnt4《2)
upDown4=!upDown4;
}
}
capture = TIM_GetCapture4(TIM2);
TIM_SetCompare4(TIM2, capture + CCR4_Val);
}
}
即將LED點亮的過程分成16(allCount)份,第一次是點亮1/16時間,而15/16的時間都是滅著的,這個1是變量hCnt來控制的,隨著中斷16次完畢,hCnt會加1,于是第二個周期來了,在這個周期中,LED會被點亮2/16,而14/16的時間是滅著的,依次類推,到最后會有 15/16的時間被點亮,而1/16的時間是滅著的,于是就產生了漸亮效果。請原諒我在學習時的代碼寫得很粗糙了。
由于TIM2_CH1通道的中斷頻率是:
CC1 update rate = TIM2 counter clock / CCR1_Val = 146.48 Hz
再除以16那就是:9.1Hz,閃爍現像應該很明顯了。
將代碼寫入芯片,事實確實是TIM2_CH1(146.48Hz)和TIM2_CH2(219.7Hz)的閃爍極明顯,幾乎看不出漸亮的過程,亮度高時幾乎全亮,亮度低時一陣狂閃。而TIM2_CH4則效果十分明顯,達到了預計的要求。TIM2_CH3(439.4)呢,則介于兩者之間,可以看出漸亮和漸滅的效果,但是也有很明顯的閃爍效應。但在示波器(傳統示波器)上,卻是TIM2_CH3的效果最好,逐漸伸縮的PWM波形看得清清楚楚。
接下來就要研究TIM的PWM方式了,用PWM方式來實現同樣的功能,應該很有趣。
STM32學習筆記——用PWM做個正弦波發生器
一、用PWM的方法實現熒火蟲燈
上次提到要用Timer的PWM功能來實現熒火蟲燈。當然還是找一個現成的例子來作個修改,這回要用到的例子在這里。
復制一份到自己練習用的文件夾中,建立工程。
從程序中可以知道:
(1) 使用TIM3
(2) 定時器的時鐘頻率是36MHz.
(3) PWM信號的頻率是36KHz,這是通過TIM3的ARR來設置的。ARR的值是999,因此PWM的頻率是36MHz/(999+1)=36KHz。
(4) 四個通道的占空比分別由TIM3_CCR1~TIM3_CCR4來確定,算式是:
(TIM3_CCR1/ TIM3_ARR)* 100
由此,當PWM的頻率是36K時,占空比分辨率接近0.1%。降低頻率,可以獲得更高的分辨率。
要完成燈的漸亮和漸滅控制,只要定時改變TIM3_CCR1的值就行了。
如何改變呢?這里用到STM32提供的系統定時器(SysTick)
數據手冊中關于這個定時器的描述如下:
-------------------------------------------------------------
系統時基定時器
這個定時器是專用于實時操作系統,也可當成一個標準的遞減計數器。它具有下述特性:
● 24位的遞減計數器
● 自動重加載功能
● 當計數器為0時能產生一個可屏蔽系統中斷
● 可編程時鐘源
而它的使用方法可以在庫提供的例子中找到。
有一個初始化函數:
void SysTick_Configuration(void)
{
if (SysTick_Config((SystemFrequency) / 10)) //經實際測試發現,除以10是100ms,除以100是10ms,依此類推
{
/* Capture error */
while (1);
}
NVIC_SetPriority(SysTick_IRQn, 0x0);
}
這里將其初始化為每100ms產生一次中斷。
將這個函數放在main.c中,在main函數中調用它,即完成初始化工作。在system32_it.c中有中斷處理函數。
void SysTick_Handler(void)
{}
原例子中這里沒有寫代碼,可以根據需要自行增加相關代碼來處理每100ms時間到的事件。
代碼如下:
extern uint16_t dutyRatio;
extern uint8_t ChangDuty;
void SysTick_Handler(void)
{ static uint8_t Counter;
if(Counter》16)
dutyRatio-=62;
else
{ dutyRatio+=62;
if(dutyRatio》999)
dutyRatio=999;
}
if(++Counter》=32)
Counter=0;
ChangDuty=1;
}
這里定義了兩個變量,一個是dutyRatio,用來控制占空比的變化。它在main.c中定義,并初始化為6。初始化TIM3_CH1通道時使用該變量。
每次中斷則視情況增加或者減少,每次變化的量是62。在SysTick_Handler函數中,定義了一個static型的變量Counter,它的值在 0~31之間變化。當其值在0~15之間時,dutyRatio每次加1,這樣一共是加16次,即其最終的值是:6+16*62=998,正好比ARR的值小1。當Counter的值在16~31之間變化時,dutyRatio每次減62。這樣,dutyRatio的值始終在6~998之間變化,對應的是占空比在:
6/999*100%=0.6% ~ 998/999*100%=99.89% 之間變化。
ChangDuty是一個標志,用途是通知main函數,占空比已發生變化,要求更新CCR1。Mina函數的處理如下:
while (1)
{ if(ChangDuty==1)
{
TIM3-》CCR1=dutyRatio;
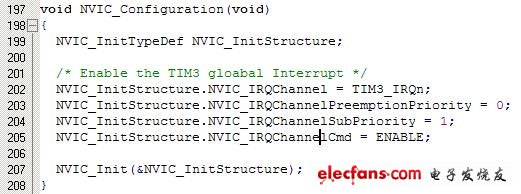
ChangDuty=0;
}
}
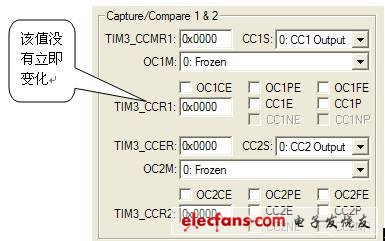
在用軟件仿真時,執行到TIM3-》CCR1=dutyRatio;時,外圍部件中的相應值并沒有立即變化。目前還沒有弄清楚是調試器的問題還是確實不立即發生變化。
使用硬件來測試,由于我手邊的板子TIM3_CH1上沒有接LED,所以就看不出燈亮的效果了,不過,不要緊,還有示波器。將程序下載入FLASH后運行,觀察GPIOA.6,可以看到非常漂亮的波形。用萬用表電壓檔測該引腳的電壓,可以看到電壓平穩地上升和下降。所以,我有些懷疑上面提到的那個CCR1沒有立即變化僅僅只是調試器的問題。//藍色的字這個不對,下面有說明。
二、用PWM生成正弦波
有了PWM,自然就可以用PWM的方法生成正弦波了。下面生成500Hz正弦波的方法參考自張明峰的《PIC單片機入門與實踐》
每個正弦波分成四個像限,每個像限16點,共64點,每點出現2個PWM周期,故PWM的周期為:2ms/128=156.25us,頻率為64KHz。
TIM3 Frequency = TIM3 counter clock/(ARR + 1)
倒過來:
ARR=TIM3 Counter Clock/TIM3 Frequenc - 1 =562.5-1 =561
如果取ARR的值是561的話,那么實際的頻率是64.056KHz,即最終生成為的正弦波頻率是:500.4Hz
有了ARR,占空比就取決于CCR1的值了,使用EXCEL可以方便地計算出第一象限的16個點的數據:
280,307,335,361,387,412,436,458,478,496,513,527,539,548,555,559
有了第一象限,其他象限都可以鏡像生成了。具體方法請看源程序。
要用上面的例子修改,還需要做一些工作。
前面是在SysTick中做出標志,然后在主程序中修改CCR1的值,現在不行了,肯定會有時間的誤差,不能這做么,要在PWM輸出后修正,這樣就要在PWM波形輸出時產生中斷。因此,需要在main函數中增加以下這個函數。
這個函數哪里來的呢,很簡單,從timebase工程中中抄來的然后將TIM2改成TIM3就行了^_^。然后在main函數中調用它。
注意,還需要打開stm32f10x_conf.h文件,將下面:
藍色框里面的包含文件給“解放”出來。當然,同時要把庫中的misc.c源程序文件加入工程中來。否則,編譯是通不過的。
為了讓通道1可以產生中斷,還需要做一件事,就是下面藍色的部分。
/* TIM IT enable */
TIM_ITConfig(TIM3, TIM_IT_CC1, ENABLE);
//也是從TIMEBASE工程中抄來,再將TIM2改成TIM3的。
/* TIM3 enable counter */
TIM_Cmd(TIM3, ENABLE);
現在該到stm32f10x_it.c中去了,增加一個中斷處理函數:
uint16_t sinTab[]={280,307,335,361,387,412,436,458,478,496,513,527,539,548,555,559};
uint8_t Count1,Count2; //1.像限計數器,其值在0~3之間變化 2.其值在0~31之間變化
void TIM3_IRQHandler(void)
{
if (TIM_GetITStatus(TIM3, TIM_IT_CC1) != RESET)
{
TIM_ClearITPendingBit(TIM3, TIM_IT_CC1);
if(Count2%2==0) //準備更新,新的值會在下一次更新
{ switch(Count1)
{ case 0: //象限1
{
TIM3-》CCR1= sinTab[Count2/2];
break;
}
case 1: //象限2
{ TIM3-》CCR1=sinTab[15-Count2/2];
break;
}
case 2: //象限3
{ TIM3-》CCR1=560-sinTab[Count2/2];
break;
}
case 3: //象限4
{ TIM3-》CCR1=560-sinTab[15-Count2/2];
break;
}
default:break;
}
}
}
if(++Count2==32)
{ Count2=0;
if(++Count1==4)
Count1=0;
}
}
也就是在這里,搞清楚了,所謂的“我有些懷疑上面提到的那個CCR1沒有立即變化僅僅只是調試器的問題”不對,這是CCR1更新方法的問題,
注意上圖中紅色框中的描述。
這里就是不用立即更新的方法。因為每個點的PWM波形會出現2次,因此,用
if(Count2%2==0) 來判斷是第一次產生PWM波形,更新CCR1,但是這個CCR1不會立即更新,而會在下一次產生PWM事件時更新。
STM32學習筆記——修修改改玩串口
還是原來的風格,找個例子來玩。但是這次的printf這個例子有點不一樣,它依賴于ST自己的EV板子,所以要用到的東西多一些了。除了上圖所示的文件以外,還要把

這里的stm32_eval.c,stm32_eval.h文件,以及圖中所示三個文件夾中任意一個文件夾中的部分文件復制到第一個圖所示的文件夾中去,這里我們選擇stm3210e_eval這個文件夾。

需要復制的文件是stm3210e_eval.h
如同前面一樣建立工程,并且注意修改stm32_eval.h的內容
將//#define USE_STM3210E_EVAL 前的#去掉。
這樣,就可以編譯并通過文件,用軟件仿真,在usart #1窗口顯示出
USART Printf Example: retarget the C library printf function to the USART
這樣一行字了。
顯然,對這樣的玩法我是不會滿意的,下面試著去掉與stm32e_eval等相關文件,把這里面需要用到的函數直接復制到main中去,同時,也了解一些串口設置的知識。
學到這里,多少有點明白了,STM提供的庫為了達到通用性的要求,用了很多的符號來替代常量,然后七轉八拐,有時不知要轉多少個彎才能找到最終對寄存器操作的代碼。這時,keil提供的符號瀏覽就很有用處了。方法是在將光標移到需要查看的符號上面,按下F12即可,通常可以直接跳轉到所需查看到的符號的出處。如下圖
![]()
將光標移到USART_BaudRate處,按下F12,即跳轉到stm32f10x_uart.h文件中相應的定義處:
如果stm32f10x_uart.h文件沒有打開,那么這個動作會自動打開這個文件。
下面我們將eval板相關的函數復制到main函數中,以便丟掉與eval板相關的文件。
(1)打開stm32_eval.h文件,將
typedef enum
{
COM1 = 0,
COM2 = 1
} COM_TypeDef;
復制到main.c中,這是用來選擇哪一個串口的,因為我的板子上也有2個串口,所以就把它復制過來,也省得對函數作較大的修改了。
(2)打開stm32_eval.c文件,有一個
void STM_EVAL_COMInit(COM_TypeDef COM, USART_InitTypeDef* USART_InitStruct)
的函數,是用來初始化端口的,我們把它復制到main.c中,并且把它改名為
void STM_COMInit(COM_TypeDef COM, USART_InitTypeDef* USART_InitStruct)
去掉中間的eval。
當然,在main函數中調用這個函數的地方也要做相應的修改。
這個函數中用到了如上圖中藍色框中的一些符號,又是一系列的轉換,用剛才所說的跟蹤方法,找到這些符號的原始出處,作出修改,最后得到的STM_COMInit函數如下:
void STM_COMInit(COM_TypeDef COM, USART_InitTypeDef* USART_InitStruct)
{
GPIO_InitTypeDef GPIO_InitStructure;
/* 打開UART所用到的GPIO引腳的時鐘*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_AFIO, ENABLE);
/* 打開UART的時鐘*/
if (COM == COM1)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
}
else //COM=COM2
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2, ENABLE);
}
/* 配置TX引腳為推挽式輸出 */
if(COM==COM1)
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9 ;
else
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* 配置RX引腳為浮動輸入(高阻?) */
if(COM==COM1)
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10 ;
else
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* 串行口配置*/
if(COM==COM1)
USART_Init(USART1, USART_InitStruct);
else
USART_Init(USART2, USART_InitStruct);
/* 串口允許*/
if(COM==COM1)
USART_Cmd(USART1, ENABLE);
else
USART_Cmd(USART2, ENABLE);
}
至此,修改基本結束,在工程中移去stm32_eval相關的各個文件,在APP文件夾中將這些文件刪除,關閉工程,再重新打開工程,編譯通過,運行通過。
下面對上述初始化工作做一些解讀,當然,少不了要數據手冊的幫忙了。
(1)UART1的時鐘來源和其他串口的時鐘來源不同,UART1的時鐘來源是:APB2,其他串口的時鐘來源:APB1。
(2)用于UART通信的引腳不會自動配置,需要手工配置。其中用于輸出信號的引腳TX必須配置成為推挽式輸出,而RX引腳則配置成浮動型輸入。
(3)串口波特率、停止位等參數由庫提供的stm32f10x_usart.c中的
void USART_Init(USART_TypeDef* USARTx, USART_InitTypeDef* USART_InitStruct)
函數來設定。
觀察這個函數的執行,可以看到函數通過對CR2寄存器的操作來設定停止位,如下圖藍色框中所示。
通過對CR1寄存器的設定來確定數據位/奇偶校驗位等,這些都只需要找到相應的符號,就能順利地進行設置,找到符號的方法,當然還是上面的按F12瀏覽的方法。
還有一個重要的工作是波特率的計算,且看這里是如何來做的。
下面這一段是波特率設置的代碼
首先根據usartxbase的值來確定需要配置的是USART1還是USART2
usartxbase = (uint32_t)USARTx;
而USARTx是傳入這個函數的一個參數。
然后據此來得到用于USART的時鐘頻率,這個頻率值被變量apbclock記錄。

從上面變量的跟蹤可以看到apbclock的值是0x44aa200即72000000,也就是72MHz。
接下來的一系列計算式就是根據波特率的值來計算應該傳入BRR寄存器的值了,偷點懶,這里就不對算式進行一一分析了(我認為暫時沒有這個必要)。
至此,USART的設置工作完成,即完成了其數據位、停止位、奇偶校驗位、波特率的設置工作。異步通信的配置工作完成。當然,細細分析,可以發現,初始還按默認方式處理了硬件握手等的處理工作。
除了使用庫函數提供的printf等函數外,我們在單片機開發中還經常使用直接對數據寄存器賦值的方法來使用串口。STM32串口的數據寄存器名為DR,因此,我試著在main函數中寫入這樣一行:
While1()
{ USART1-》DR=0x55;
}
一試成功,軟件仿真時,在串行窗口出現了大串的字符55.
好了,串口暫時告一段落。
?
——下次將討論學習用PWM做個正弦波發生器,敬請繼續關注。
?









 工商網監
工商網監
評論